Ẹ̀rọ ìfọwọ́sowọ́pọ̀ Pneumatic Meji Ika Soft Gripper Vacuum Generator fún Àdáṣe Robot



Ẹ̀rọ ìfọwọ́sowọ́pọ̀ Pneumatic Meji Ika Soft Gripper Vacuum Generator fún Àdáṣe Robot
Ẹ̀ka Àkọ́kọ́
Apá robot ilé-iṣẹ́ /Apá robot aláfọwọ́sowọ́pọ̀ / Gígé iná mànàmáná/Oníṣẹ́ ọgbọ́n/Àwọn ojútùú adaṣiṣẹ
Ohun elo

Àwọn roboti SCIC Z-EFG series jẹ́ ìwọ̀n kékeré pẹ̀lú ètò servo tí a ṣe sínú rẹ̀, èyí tí ó mú kí ó ṣeé ṣe láti ṣàṣeyọrí ìṣàkóso tí ó péye ti iyàrá, ipò, àti agbára ìdènà. Ètò ìdènà SCIC fún àwọn iṣẹ́ àdáṣe yóò jẹ́ kí o ṣí àwọn àǹfààní tuntun sílẹ̀ fún ṣíṣe àdáṣe àwọn iṣẹ́ tí o kò rò pé ó ṣeé ṣe.
Ẹ̀yà ara
· Ìkọlù ńlá
· Agbára ìdènà tí a lè ṣàtúnṣe àti ìkọlù tí a lè ṣàtúnṣe
· Ìgbésí ayé gígùn: ọ̀kẹ́ àìmọye àwọn ìyípo, tí ó ju àwọn èékánná afẹ́fẹ́ lọ
· Olùdarí tí a ṣe sínú rẹ̀: ìwọ̀n kékeré, ìṣọ̀kan tí ó rọrùn
· Iṣakoso ọkọ akero EIA485, I/O
Agbára Ìdènà: 40-130N, Apẹrẹ Y ti Gripper ina pẹlu ikọlu 120mm
Stroke Gigun
Líle gbogbo: 120mm
Ipò Ìṣàkóso
485 Modbus, EIA485, Iṣakoso Bọ́ọ̀sì
Agbára Ìdìmú
Agbara mimu 40-130N Atunṣe
Olùdarí Inú
Nsopọ agbegbe kekere, o rọrun lati ṣepọ
Iṣakoso Ipese
Àtúnṣe: ±0.02mm
Ìdìmọ́ra Rírọ
Ó lè di àwọn nǹkan tó jẹ́ ẹlẹ́gẹ́ àti tó lè bàjẹ́ mú.

● Ṣíṣe ìgbéga ìyípadà nínú yíyípadà àwọn ohun èlò ìdènà pneumatic pẹ̀lú àwọn ohun èlò ìdènà iná mànàmáná, ohun èlò ìdènà iná mànàmáná àkọ́kọ́ pẹ̀lú ètò servo tí a ti ṣepọ̀ ní China.
● Rírọ́pò pípé fún compressor afẹ́fẹ́ + àlẹ̀mọ́ + fáìlì solenoid + fáìlì throttle + gígé pneumatic
● Ìgbésí ayé iṣẹ́ ọ̀pọ̀lọpọ̀ àwọn kẹ̀kẹ́, ní ìbámu pẹ̀lú sílíńdà ilẹ̀ Japan àtijọ́



Ìlànà Ìṣàpèjúwe
| Nọ́mbà Àwòṣe Z-EFG-130 | Àwọn ìpele |
| Àròpọ̀ ọpọlọ | 120mm |
| Agbára dídìmú | 40-130N |
| Àtúnṣe | ±0.02mm |
| Iwuwo mimu ti a ṣeduro | Púpọ̀ jùlọ. 1kg |
| Gbigbe ipo | Skru nut + asopọ |
| Àtúnṣe òróró àwọn èròjà tí ń gbéra | Ni gbogbo oṣu mẹfa tabi miliọnu kan awọn iṣipopada / akoko |
| Àkókò ìṣípò ìlù ọ̀nà kan | 0.9s |
| Iwọn iwọn otutu iṣiṣẹ | 5-55℃ |
| Iwọn ọriniinitutu iṣiṣẹ | RH35-80(Ko si yinyin) |
| Ipò ìṣípo | Ìsopọ̀ |
| Ìṣàkóso ìfàjẹ̀sí | A le ṣatunṣe |
| Ṣíṣe àtúnṣe agbára ìfúnpọ̀ | A le ṣatunṣe |
| Ìwúwo | 0.8kg |
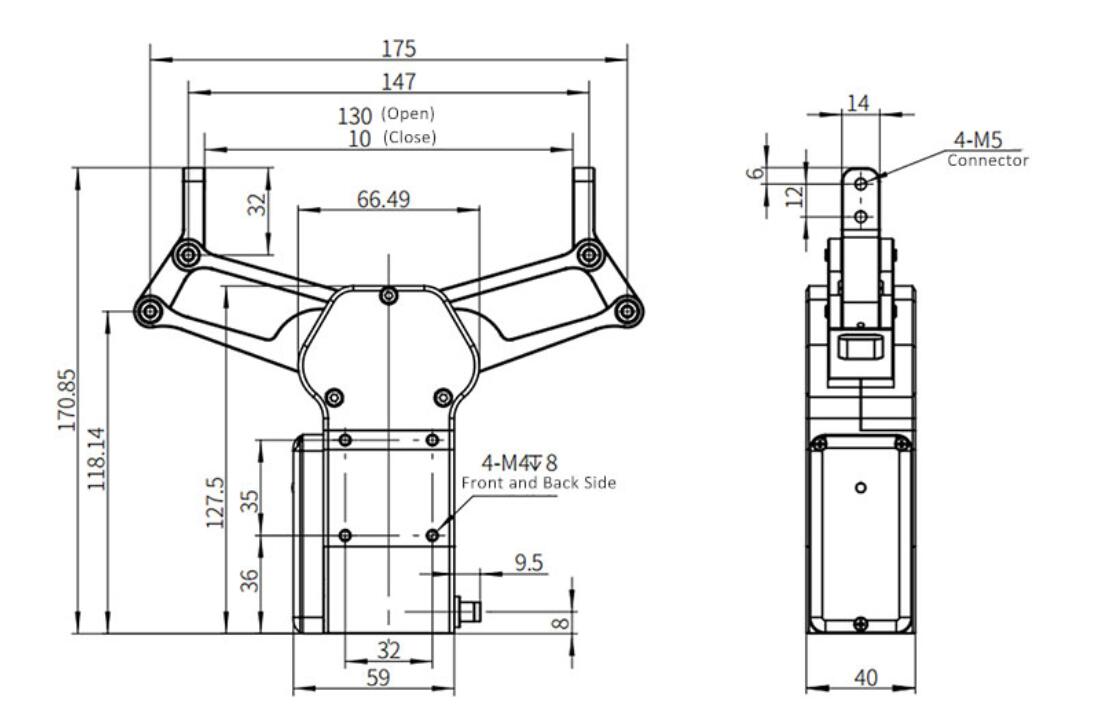
| Àwọn ìwọ̀n(L*W*H) | 171*187*40mm(ṣí)218*66.5*40m(tí a ti pa) |
| Ipò olùdarí | Inu-inu |
| Agbára | 10W |
| Iru mọto | DC láìsí brush |
| Òkè Ìṣàn omi | 2A |
| Fólẹ́ẹ̀tì tí a fún ní ìwọ̀n | 24V |
| Iduro lọwọlọwọ | 0.4A |
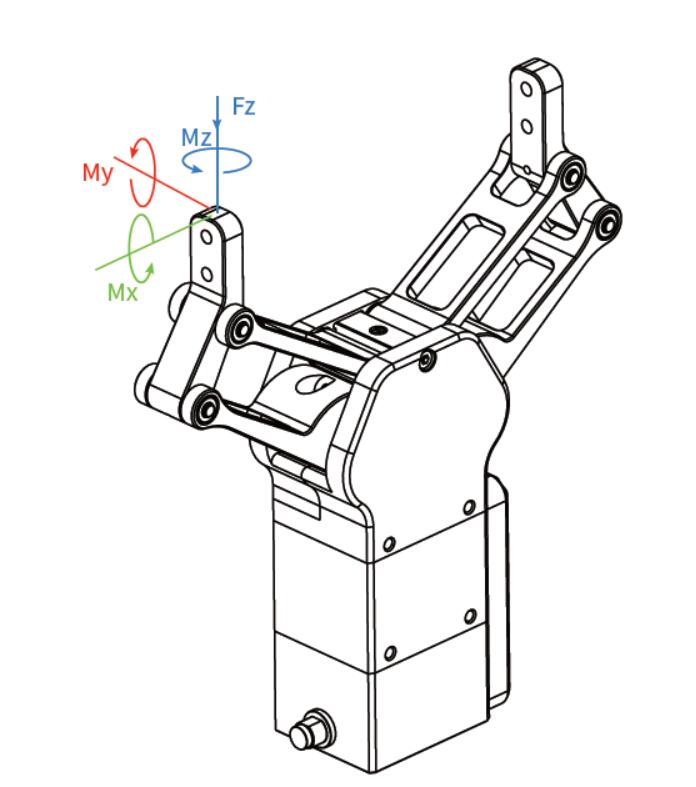
| Ẹrù tí a lè gbà láàyè ní ìtọ́sọ́nà inaro | |
| Fz: | 200N |
| Ìyípo tí a lè gbà láàyè | |
| Ọ̀gágun: | 2 Nm |
| Mi: | 2 Nm |
| Mz: | 2 Nm |
Plug ati Play, Rọrùn lati Ṣọpọ
Gígé iná mànàmáná Z-EFG-130 lè bá apá robot alájọṣepọ̀ mu, ó sì ní ètò servo tí a ti ṣepọ̀ nínú rẹ̀, gírípítà kan ṣoṣo ló lè dọ́gba pẹ̀lú compressor + filter + solenoid Valve + Throttle Valve + air gripper.


Stroke Long, Ibamu nla
Ìlànà tó gbéṣẹ́ láti fi mú kí iná mànàmáná lè tó 120mm, ìwọ̀n pípẹ́ rẹ̀ jẹ́ 10mm, a lè lo ohun èlò ìkọ́lé iná mànàmáná fún ẹ̀rọ semiconductor chip, ẹ̀rọ itanna 3C àti àwọn ilé iṣẹ́ ìṣedéédé míràn, àti bẹ́ẹ̀ bẹ́ẹ̀ lọ.
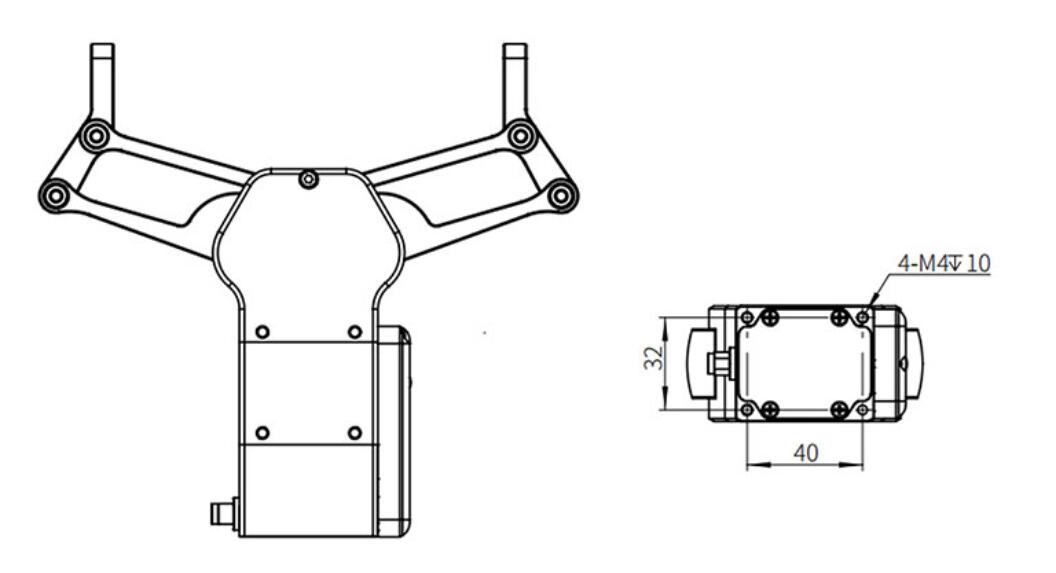
Iwọn kekere, Rọrun lati ṣepọ

Iwọn ṣiṣi Z-EFG-130 jẹ 171*187*40mm, iwọn pipade jẹ 218*66.5*40mm, o jẹ eto kekere, o ṣe atilẹyin fun awọn iru fifi sori ẹrọ isodipupo, o jẹ oludari inu, agbegbe kekere ti a bo.

Iṣakoso Agbara Ipese
Agbára ìdènà iná mànàmáná náà ni láti lo àpẹẹrẹ ìgbékalẹ̀ pàtàkì àti ìsanpadà algoridimu ìwakọ̀, agbára ìdènà náà jẹ́ 40-130N tí a lè ṣàtúnṣe, ìwọ̀n ìdènà náà sì jẹ́ ≤1kg, ó sì lè ṣe àtúnṣe ±0.02mm.
Gbigbá Adaptive, Ìrù Tó Ń Yí Padà

Ohun èlò ìdènà iná mànàmáná ti Z-EFG-130 ń ṣe àtìlẹ́yìn fún ìdènà àdábọwọ́, ó dára jù fún ohun tí ó yípo, tí ó ní ìrísí tàbí ohun tí ó ní ìrísí pàtàkì, àwọn ẹ̀yà ìrù rẹ̀ lè yípadà ní ìrọ̀rùn, àwọn oníbàárà lè di àwọn ohun náà mú gẹ́gẹ́ bí wọ́n ṣe fẹ́.


Ṣíṣe Àwọn Ìṣàkóso Púpọ̀, Rọrùn láti Ṣiṣẹ́

Modbus le ṣakoso deedee gripper ina, iṣeto rẹ rọrun, lati lo ilana ibaraẹnisọrọ ti Digital I/O, o kan nilo okun waya kan lati sopọ pẹlu ON/OFF, o baamu pẹlu eto iṣakoso akọkọ PLC.
Ibudo Ibudo ti Atunse Walẹ
Iṣẹ́ wa






