Ẹ̀RỌ ...



Ẹ̀ka Àkọ́kọ́
Apá robot ilé-iṣẹ́ /Apá robot aláfọwọ́sowọ́pọ̀ / Gígé iná mànàmáná/Oníṣẹ́ ọgbọ́n/Àwọn ojútùú adaṣiṣẹ
Ohun elo
Àwọn roboti SCIC Z-EFG series jẹ́ ìwọ̀n kékeré pẹ̀lú ètò servo tí a ṣe sínú rẹ̀, èyí tí ó mú kí ó ṣeé ṣe láti ṣàṣeyọrí ìṣàkóso tí ó péye ti iyàrá, ipò, àti agbára ìdènà. Ètò ìdènà SCIC fún àwọn iṣẹ́ àdáṣe yóò jẹ́ kí o ṣí àwọn àǹfààní tuntun sílẹ̀ fún ṣíṣe àdáṣe àwọn iṣẹ́ tí o kò rò pé ó ṣeé ṣe.

Ẹ̀yà ara
· Wiwa fifa silẹ, iṣẹ iṣelọpọ agbegbe
· A le ṣakoso agbara, ipo ati iyara ni deede nipasẹ Modbus
· Ìgbésí ayé gígùn: ọ̀kẹ́ àìmọye àwọn ìyípo, tí ó ju àwọn èékánná afẹ́fẹ́ lọ
· Olùdarí tí a ṣe sínú rẹ̀: ìtẹ̀síwájú kékeré, ìṣọ̀kan tí ó rọrùn
· Ipo iṣakoso: 485 (Modbus RTU), I/O
Agbara clamping, iyara le jẹ deede lati ṣakoso nipasẹ Modbus
Ohun elo pupọ
O ni wiwa fifọ mimu ati iṣelọpọ agbegbe
Ti o tọ si Iṣakoso
A le ṣakoso agbara clamping, bit, iyara nipasẹ Modbus
Ìgbésí ayé gígùn
Mílíọ̀nù mẹ́wàá ló ń rìn kiri, lórí afẹ́fẹ́
Adarí tí a ṣe sínú rẹ̀
Gbígbé ààyè kékeré, ó rọrùn láti ṣepọ.
Kíákíá láti Dáhùn
Àkókò tó kúrú jùlọ fún ìfúnpá kan ṣoṣo ni 0.25s péré
Ìdìmọ́ra Rírọ
Ó lè di àwọn nǹkan tó jẹ́ ẹlẹ́gẹ́ mú, bí ẹyin, ago dígí, àti bẹ́ẹ̀ bẹ́ẹ̀ lọ.




Ìlànà Ìṣàpèjúwe
Z-EFG-26 jẹ́ ẹ̀rọ ìdènà oníná mànàmáná oní ìka méjì, ó kéré ní ìwọ̀n ṣùgbọ́n ó lágbára láti di ọ̀pọ̀lọpọ̀ nǹkan onírọ̀rùn mú bí ẹyin, páìpù, àwọn èròjà ẹ̀rọ itanna, àti bẹ́ẹ̀ bẹ́ẹ̀ lọ.
● Ohun èlò ìdènà iná mànàmáná Z-EFG-26 ní ohun èlò ìdarí tí a ṣe sínú rẹ̀.
●Agbára ìlù àti ìdìmú rẹ̀ ṣeé yípadà.
●A le rọpo awọn ebute lati ṣatunṣe si awọn ibeere oriṣiriṣi.
●Ó rọrùn láti gbé àwọn nǹkan tó jẹ́ ẹlẹ́gẹ́ àti tó lè bàjẹ́, bíi ẹyin, àwọn ọ̀pá ìdánwò, òrùka, àti bẹ́ẹ̀ bẹ́ẹ̀ lọ.
●Ó yẹ fún àwọn ìṣẹ̀lẹ̀ tí kò ní orísun afẹ́fẹ́ (bíi àwọn yàrá ìwádìí, àti àwọn ilé ìwòsàn).
| Nọmba awoṣe Z-EFG-26 | Àwọn ìpele |
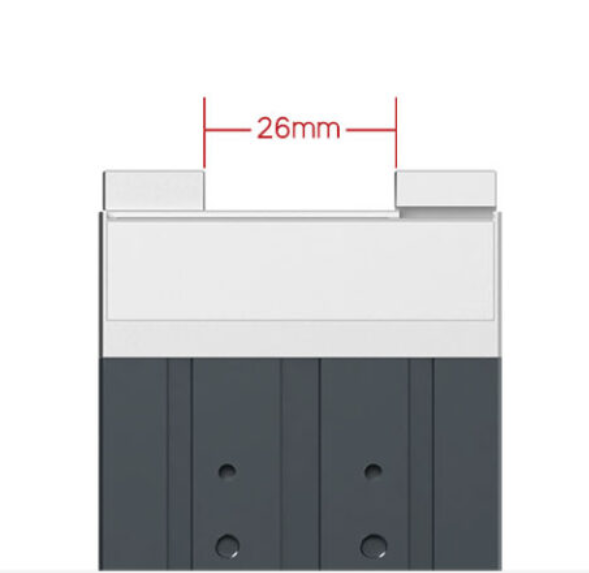
| Àròpọ̀ ọpọlọ | 26mm |
| Agbára dídìmú | 6~15N |
| Àtúnṣe | ±0.02mm |
| Iwuwo mimu ti a ṣeduro | Àṣejù. 0.3kg |
| Gbigbe ipo | Àgbékalẹ̀ jíà + ìtọ́sọ́nà ìyípo àgbélébùú |
| Àtúnṣe òróró àwọn èròjà tí ń gbéra | Ni gbogbo oṣu mẹfa tabi awọn iṣipopada miliọnu kan / akoko |
| Àkókò ìṣípò ìlù ọ̀nà kan | 0.25s |
| Iwọn iwọn otutu iṣiṣẹ | 5-55℃ |
| Iwọn ọriniinitutu iṣiṣẹ | RH35-80(Ko si yinyin) |
| Ipò ìṣípo | Ìka ọwọ́ méjì ń gbéra ní ìpele tí ó wà ní ìlà-òrùn |
| Ìṣàkóso ìfàjẹ̀sí | A le ṣatunṣe |
| Ṣíṣe àtúnṣe agbára ìfúnpọ̀ | A le ṣatunṣe |
| Ìwúwo | 0.45kg |
| Àwọn ìwọ̀n(L*W*H) | 55*26*97mm |
| Ipò olùdarí | Inu-inu |
| Agbára | 10W |
| Iru mọto | DC láìsí brush |
| Òkè Ìṣàn omi | 1A |
| Fólẹ́ẹ̀tì tí a fún ní ìwọ̀n | 24V |
| Iduro lọwọlọwọ | 0.4A |
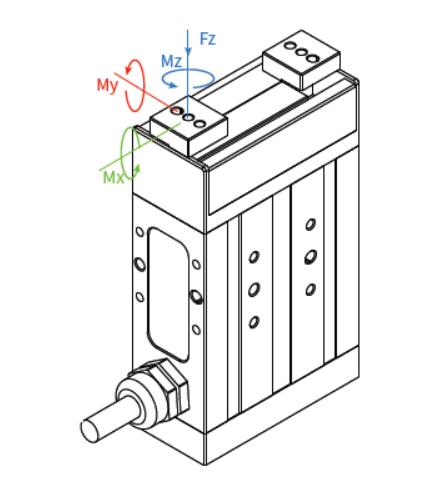
| Ẹrù tí a lè gbà láàyè ní ìtọ́sọ́nà inaro | |
| Fz: | 250N |
| Ìyípo tí a lè gbà láàyè | |
| Ọ̀gágun: | 2.4 Nm |
| Mi: | 2.6 Nm |
| Mz: | 2 Nm |
Ìlànà Ìṣàkóso Agbára Pípé láti Túnṣe

Agbára ìdènà iná mànàmáná ti gba àgbékalẹ̀ ìfàsẹ́yìn pàtàkì àti ìṣirò ìwakọ̀ láti san án padà, gbogbo ìfàsẹ́yìn rẹ̀ jẹ́ 26mm, agbára ìdènà jẹ́ 6-15N, a lè ṣàtúnṣe agbára ìdènà àti agbára ìdènà, àti pé a lè tún un ṣe ±0.02mm.
Ìdáhùn Yára, Iduroṣinṣin Díẹ̀

Akoko kukuru ti ọpọlọ kan ṣoṣo jẹ 0.25s nikan, o le pade ibeere mimu iyara ati iduroṣinṣin fun laini iṣelọpọ.
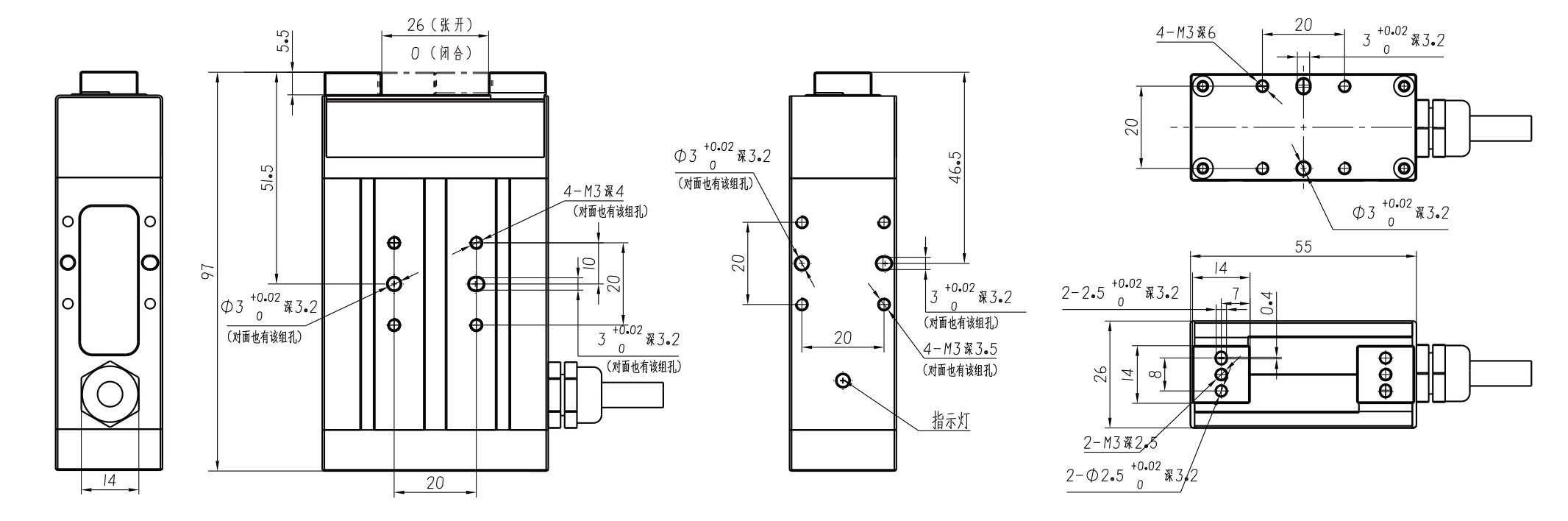
Fgure kekere, o rọrun lati wọle si ẹnu-ọna

Ìwọ̀n Z-EFG-26 jẹ́ L55*W26*H97mm, ìṣètò rẹ̀ kéré, ó ń ṣe àtìlẹ́yìn fún àwọn ipò ìfisílé tó rọrùn jù márùn-ún, ó jẹ́ olùdarí tí a kọ́ sínú rẹ̀, àyè kékeré ló ń gbà, ó rọrùn láti ṣe iṣẹ́ púpọ̀ fún onírúurú ìbéèrè ìfọwọ́sowọ́pọ̀.

Asopọmọra Aṣọ Iwakọ ati Adarí Ti a Ṣọkan

A le yi apa iru ti gripper ina pada ni irọrun, iwuwo dimole rẹ jẹ 300g, awọn alabara le ṣe apẹrẹ apa iru ti gripper pataki lati pade awọn ohun mimu tiwọn, lati jẹ ki gripper ina le pari awọn iṣẹ mimu ni iwọn pupọ julọ.
Awọn ipo Iṣakoso pupọ, Rọrun lati Ṣiṣẹ

Iṣeto ti Z-EFG-26 gripper rọrun, o ni ipo iṣakoso lọpọlọpọ: 485 (Modbus RTU), Pulse, I/O, o baamu pẹlu eto iṣakoso akọkọ PLC.

Àwòrán Ìfisílẹ̀ Ìwọ̀n
Iṣẹ́ wa







