Ẹ̀RỌ ...



Ẹ̀ka Àkọ́kọ́
Apá robot ilé-iṣẹ́ /Apá robot aláfọwọ́sowọ́pọ̀ / Gígé iná mànàmáná/Oníṣẹ́ ọgbọ́n/Àwọn ojútùú adaṣiṣẹ
Ohun elo
Àwọn roboti SCIC Z-EFG series jẹ́ ìwọ̀n kékeré pẹ̀lú ètò servo tí a ṣe sínú rẹ̀, èyí tí ó mú kí ó ṣeé ṣe láti ṣàṣeyọrí ìṣàkóso tí ó péye ti iyàrá, ipò, àti agbára ìdènà. Ètò ìdènà SCIC fún àwọn iṣẹ́ àdáṣe yóò jẹ́ kí o ṣí àwọn àǹfààní tuntun sílẹ̀ fún ṣíṣe àdáṣe àwọn iṣẹ́ tí o kò rò pé ó ṣeé ṣe.

Ẹ̀yà ara

· Agbára ìdènà ńlá, ìdènà seif oníṣẹ́
· A le ṣatunṣe lilu, agbara mimu le ṣatunṣe
·Ìgbésí ayé gígùn: ọ̀kẹ́ àìmọye àwọn ìyípo, tí ó ju àwọn èékánná afẹ́fẹ́ lọ
· Olùdarí tí a ṣe sínú rẹ̀: ìtẹ̀síwájú kékeré, ìṣọ̀kan tí ó rọrùn
·Ipo Iṣakoso: 485 (Modbus RTU), I/O
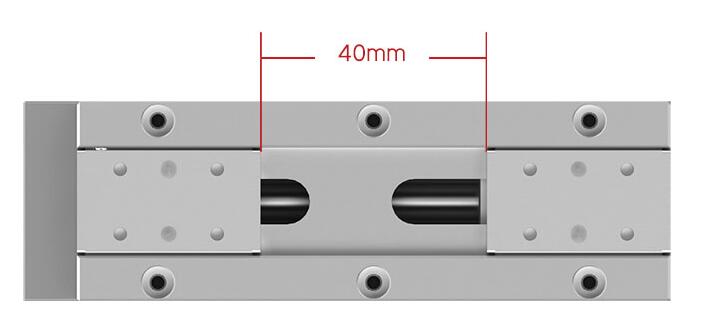
Stroke 40mm, Agbára Ìdènà 100N, Títìpa ara ẹni lórí ẹ̀rọ, Kò sí ìfàsẹ́yìn lẹ́yìn tí a bá ti pa agbára
Ìrora Ńlá
Apapọ iyipo jẹ 40mm ṣatunṣe
Agbára Ìdìmú
40-100N, ìwọ̀n ìfúnpọ̀ tí a ṣeduro ≤1kg
Titiipa ara ẹni lori ẹrọ
Titiipa ara ẹni fun ẹrọ, ko si isubu silẹ paapaa ti agbara ba wa ni pipa
A ṣe iṣakoso naa sinu
Ibora yara kekere ti o rọrun lati ṣepọ.
Kíákíá láti Dáhùn
Àkókò tó kúrú jùlọ fún ìlù kan ṣoṣo ni 0.4s péré
Ìgbésí ayé gígùn
Àwọn kẹ̀kẹ́ mílíọ̀nù mẹ́wàá, kọjá afẹ́fẹ́ tí ń gbé kiri

● Ṣíṣe ìgbéga ìyípadà nínú yíyípadà àwọn ohun èlò ìdènà pneumatic pẹ̀lú àwọn ohun èlò ìdènà iná mànàmáná, ohun èlò ìdènà iná mànàmáná àkọ́kọ́ pẹ̀lú ètò servo tí a ti ṣepọ̀ ní China.
● Rírọ́pò pípé fún compressor afẹ́fẹ́ + àlẹ̀mọ́ + fáìlì solenoid + fáìlì throttle + gígé pneumatic
● Ìgbésí ayé iṣẹ́ ọ̀pọ̀lọpọ̀ àwọn kẹ̀kẹ́, ní ìbámu pẹ̀lú sílíńdà ilẹ̀ Japan àtijọ́



Ìlànà Ìṣàpèjúwe
| Nọmba awoṣe Z-EFG-40-100 | Àwọn ìpele |
| Líle gbogbo àrùn | 40mm ṣatunṣe |
| Agbára dídìmú | A le ṣatunṣe 40-100N |
| Àtúnṣe | ±0.02mm |
| Iwuwo mimu ti a ṣeduro | ≤1kg |
| Ipo gbigbe | Àpótí jíà + ìtọ́sọ́nà oníyípo |
| Àtúnṣe òróró àwọn èròjà tí ń gbéra | Ni gbogbo oṣu mẹfa tabi miliọnu kan awọn iṣipopada / akoko |
| Àkókò ìṣípò ìlù ọ̀nà kan | 0.4s |
| Ipò ìṣípo | Ìka ọwọ́ méjì ń gbéra ní ìpele tí ó wà ní ìlà-òrùn |
| Ìwúwo | 1kg |
| Àwọn ìwọ̀n (L*W*H) | 85*37*120mm |
| Fóltéèjì iṣiṣẹ́ | 24V ± 10% |
| Iye lọwọlọwọ ti a ṣe ayẹwo | 0.5A |
| Òkè ìṣàn omi | 4A |
| Agbára | 12W |
| Ẹgbẹ́ ààbò | IP20 |
| Iru mọto | DC láìsí brush |
| Iwọn iwọn otutu iṣiṣẹ | 5-55℃ |
| Iwọn ọriniinitutu iṣiṣẹ | RH35-80 (Ko si yìnyín) |
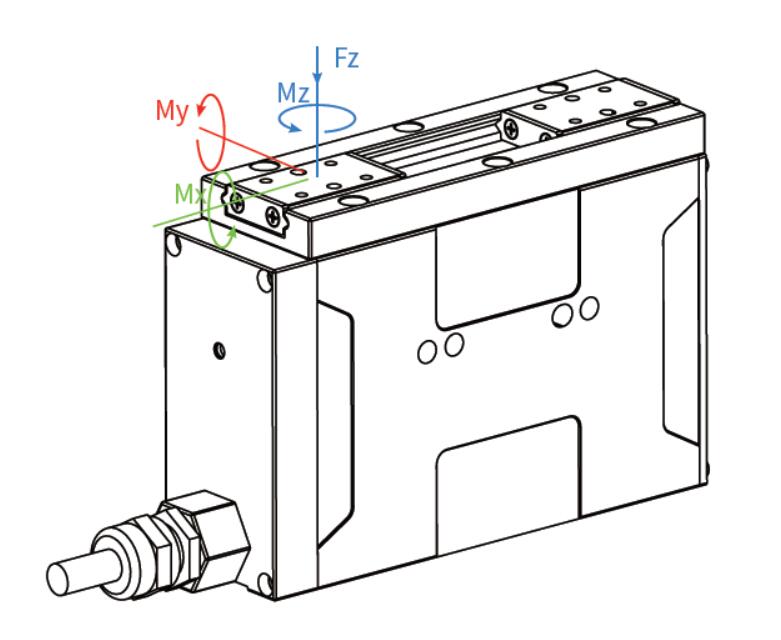
| Ẹrù tí a lè gbà láàyè ní ìtọ́sọ́nà inaro | |
| Fz: | 200N |
| Ìyípo tí a lè gbà láàyè | |
| Ọ̀gágun: | 8 Nm |
| Mi: | 6.1 Nm |
| Mz: | 6.1 Nm |
Iṣakoso Agbara Ideede, Atunṣe Giga

Gígé iná mànàmáná Z-EFG-40-100 ti gba apẹẹrẹ gbigbe pataki ati isanpada algoridimu awakọ, apapọ ikọlu jẹ 40mm, agbara mimu jẹ 40-100N, ikọlu ati agbara rẹ le ṣatunṣe, ati pe atunṣe rẹ jẹ ±0.02mm.

Yára láti Dáhùn, Yára àti Idúróṣinṣin Díẹ̀ sí i

Agbára ìdènà iná mànàmáná náà ni láti gba ọ̀nà ìfiránṣẹ́ ti ọ̀pá ìdènà + ìgbànú àkókò + ìtọ́sọ́nà bọ́ọ̀lù, àkókò kúkúrú rẹ̀ ti ìdènà kan ṣoṣo ni àkókò ìdènà jẹ́ 0.4s nìkan, èyí tí ó lè pàdé àwọn ìbéèrè ìdènà fún laini iṣẹ́.
Gbígbé agbègbè kékeré, tí ó rọrùn láti sopọ̀ mọ́ra

Agbára ìdènà iná mànàmáná náà gbọ́dọ̀ gba ìka méjì-tí ó jọra, ìwọ̀n rẹ̀ jẹ́ L85*W37*H120mm, ìṣètò rẹ̀ kéré, láti ṣe àtìlẹ́yìn fún àwọn ipò ìfisílé tí ó ju márùn-ún lọ, olùdarí rẹ̀ wà nínú rẹ̀, ó sì gba yàrá kékeré, èyí tí ó lè rọrùn láti bójú tó onírúurú iṣẹ́ ìdènà.


Asopọmọra Aṣọ Iwakọ ati Adarí Ti a Ṣọkan

A le yi iru Z-EFG-40-100 pada ni irọrun, iwuwo fifẹ rẹ jẹ ≤1kg, alabara le ṣe apẹrẹ awọn ẹya iru gẹgẹ bi awọn ohun ti n dimu, lati rii daju pe onirin ina pari iṣẹ mimu ni iwọn ti o pọ julọ.
Ṣíṣe Àwọn Ìṣàkóso Púpọ̀, Rọrùn láti Ṣiṣẹ́

Iṣeto ti Z-EFG-40-100 electric gripper rọrun, o ni ọpọlọpọ awọn ipo iṣakoso, pẹlu 485 (Modbus RTU), Pulse, I/O, eyiti o baamu pẹlu eto iṣakoso akọkọ PLC.

Ibudo Ibuwo ti Atunse Walẹ
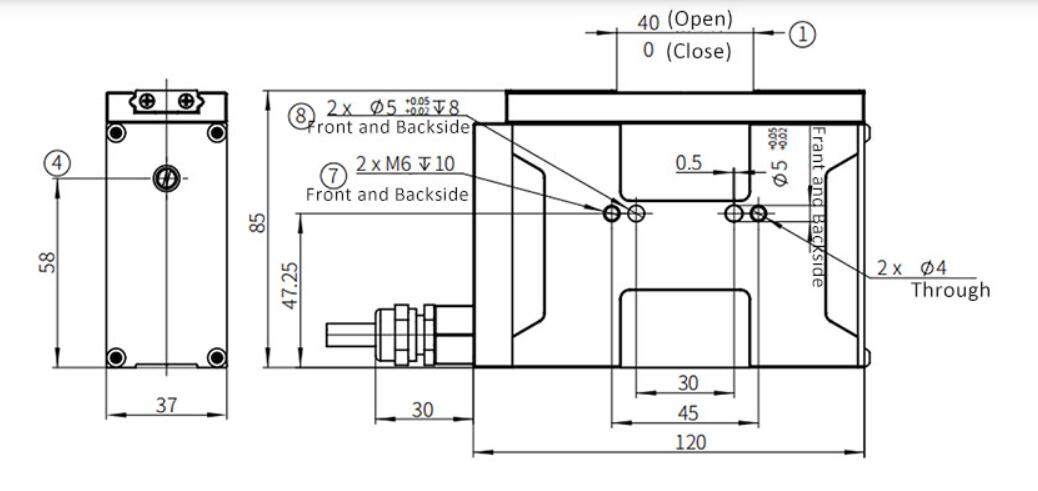
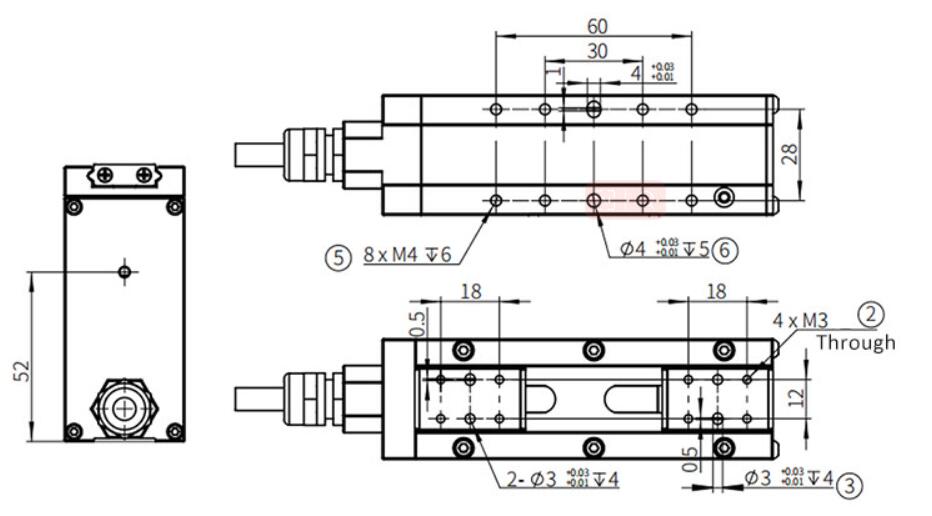
1) Ìlù ti ohun èlò ìdènà iná mànàmáná
2) Ibi fifi sori ẹrọ (Iho ti a fi okun so)
3) Ibi fifi sori ẹrọ (Iho Pin)
4) Ipò Ṣíṣí ọwọ́ àti píparí
5) Ibi fifi sori ẹrọ ni isalẹ (Iho ti a fi okun so)
6) Ibi fifi sori ẹrọ ni isalẹ (Iho Pin)
7) Ibi tí a fi sori ẹrọ Flank (Ihò Pin)
8) Ibi tí a fi sori ẹrọ Flank (Ihò tí a fi okùn so)
Iṣẹ́ wa







