Ẹ̀RỌ ...




Ẹ̀ka Àkọ́kọ́
Apá robot ilé-iṣẹ́ /Apá robot aláfọwọ́sowọ́pọ̀ / Gígé iná mànàmáná/Oníṣẹ́ ọgbọ́n/Àwọn ojútùú adaṣiṣẹ
Ohun elo
Àwọn roboti SCIC Z-EFG series jẹ́ ìwọ̀n kékeré pẹ̀lú ètò servo tí a ṣe sínú rẹ̀, èyí tí ó mú kí ó ṣeé ṣe láti ṣàṣeyọrí ìṣàkóso tí ó péye ti iyàrá, ipò, àti agbára ìdènà. Ètò ìdènà SCIC fún àwọn iṣẹ́ àdáṣe yóò jẹ́ kí o ṣí àwọn àǹfààní tuntun sílẹ̀ fún ṣíṣe àdáṣe àwọn iṣẹ́ tí o kò rò pé ó ṣeé ṣe.

Ẹ̀yà ara

· Wiwa fifa silẹ, iṣẹ iṣelọpọ agbegbe
· A le ṣakoso agbara, ipo ati iyara ni deede nipasẹ Modbus
·Ìgbésí ayé gígùn: ọ̀kẹ́ àìmọye àwọn ìyípo, tí ó ju àwọn èékánná afẹ́fẹ́ lọ
· Olùdarí tí a ṣe sínú rẹ̀: ìtẹ̀síwájú kékeré, ìṣọ̀kan tí ó rọrùn
·Ipo Iṣakoso: 485 (Modbus RTU), I/O
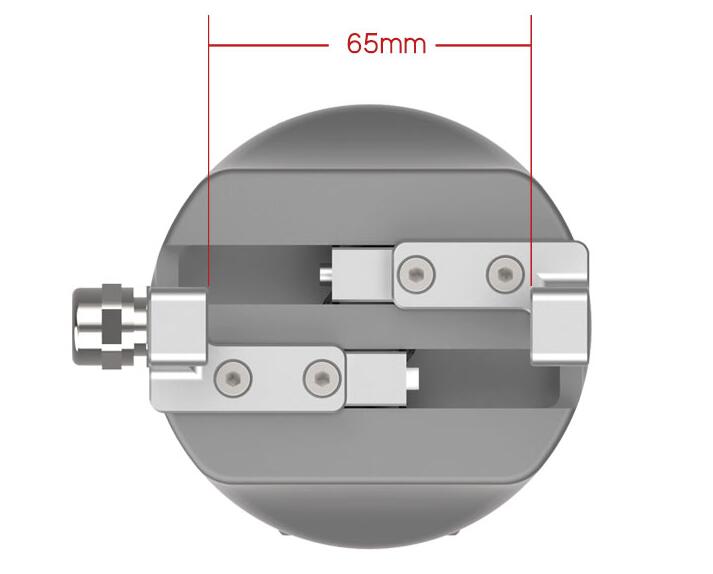
Stoke 65mm, Agbára Ìdènà 300N, Ó bá Apá Robot oní-apá mẹ́fà mu
Igbohunsafẹfẹ giga
Àkókò ìkọlù tó kúrú jùlọ ni 0.5s
Pípé Gíga
Àtúnṣe jẹ́ ±0.03mm
Ẹrù Gíga
Ìwọ̀n ìfúnpọ̀ ≤1.5 kg tí a dámọ̀ràn
Plug ki o si mu ṣiṣẹ
Ọpá ina mọnamọna pataki fun apa robot 6-axis
Ìrù Tó Ń Yípadà
Irù rẹ̀ lè yípadà, ó sì yẹ fún onírúurú ìbéèrè
Ìdìmọ́ra Rírọ
Ó lè di àwọn nǹkan tó jẹ́ ẹlẹ́gẹ́ àti tó ti díbàjẹ́ mú

● Ṣíṣe ìgbéga ìyípadà nínú yíyípadà àwọn ohun èlò ìdènà pneumatic pẹ̀lú àwọn ohun èlò ìdènà iná mànàmáná, ohun èlò ìdènà iná mànàmáná àkọ́kọ́ pẹ̀lú ètò servo tí a ti ṣepọ̀ ní China.
● Rírọ́pò pípé fún compressor afẹ́fẹ́ + àlẹ̀mọ́ + fáìlì solenoid + fáìlì throttle + gígé pneumatic
● Ìgbésí ayé iṣẹ́ ọ̀pọ̀lọpọ̀ àwọn kẹ̀kẹ́, ní ìbámu pẹ̀lú sílíńdà ilẹ̀ Japan àtijọ́



Ìlànà Ìṣàpèjúwe
| Nọ́mbà Àwòṣe Z-EFG-C65 | Àwọn ìpele |
| Líle gbogbo àrùn | 65mm le ṣatunṣe |
| Agbára dídìmú | 60-300N tí a lè ṣàtúnṣe |
| Àtúnṣe | ±0.03mm |
| Iwuwo mimu ti a ṣeduro | ≤6kg |
| Ipo gbigbe | Àpótí jíà + ìtọ́sọ́nà oníyípo |
| Àtúnṣe òróró àwọn èròjà tí ń gbéra | Ni gbogbo oṣu mẹfa tabi miliọnu kan awọn iṣipopada / akoko |
| Àkókò ìṣípò ìlù ọ̀nà kan | 0.5s |
| Ipò ìṣípo | Ìka ọwọ́ méjì ń gbéra ní ìpele tí ó wà ní ìlà-òrùn |
| Ìwúwo | 1.5kg |
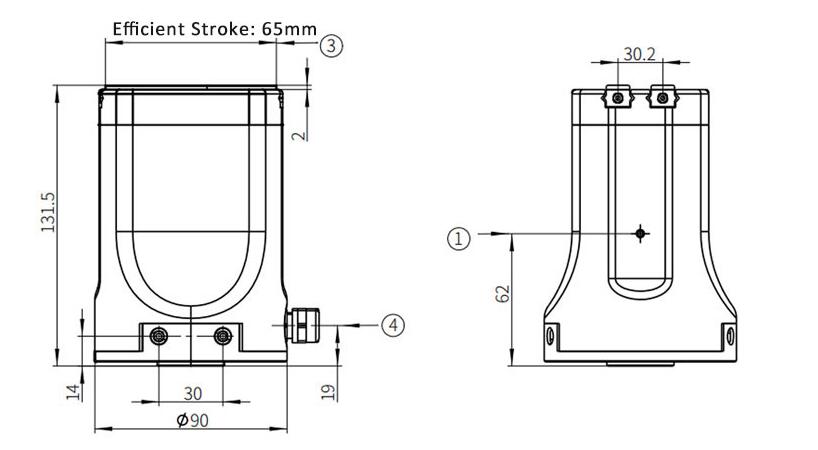
| Àwọn ìwọ̀n (L*W*H) | 90*90*178mm |
| Fóltéèjì iṣiṣẹ́ | 24V ± 10% |
| Iye lọwọlọwọ ti a ṣe ayẹwo | 0.8A |
| Òkè ìṣàn omi | 2A |
| Agbára | 20W |
| Ẹgbẹ́ ààbò | IP20 |
| Iru mọto | DC láìsí brush |
| Iwọn iwọn otutu iṣiṣẹ | 5-55℃ |
| Iwọn ọriniinitutu iṣiṣẹ | RH35-80 (Ko si yìnyín) |

| Ẹrù tí a lè gbà láàyè ní ìtọ́sọ́nà inaro | |
| Fz: | 600N |
| Ìyípo tí a lè gbà láàyè | |
| Ọ̀gágun: | 15 Nm |
| Mi: | 15 Nm |
| Mz: | 15 Nm |
Awakọ ti a ṣepọ ati Oluṣakoso
Gígé iná mànàmáná Z-EFG-C65 ní ètò servo tí a ṣepọ nínú rẹ̀, gbogbo ìgbésẹ̀ rẹ̀ jẹ́ 65mm, agbára ìdènà jẹ́ 60-300N, agbára ìdènà àti agbára ìdènà rẹ̀ ṣeé ṣàtúnṣe, àti pé ó ṣeé tún ṣe é ṣe ±0.03mm.

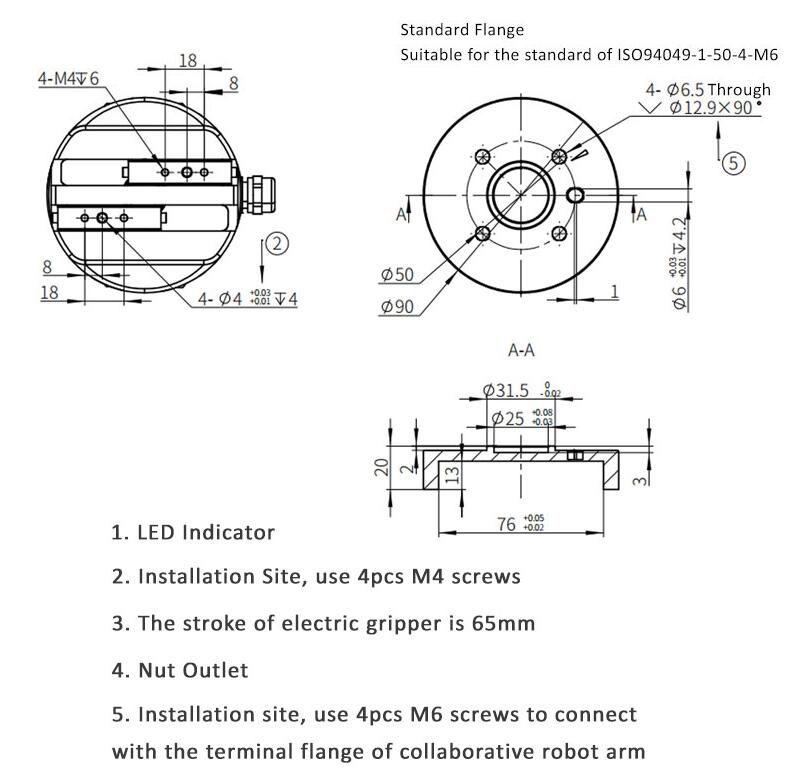
Ni ibamu pẹlu Six-Axis Robot Arm

Igi ina mọnamọna le ni ibamu pẹlu apa robot 6-axis, lati ṣe aṣeyọri plug ati play, akoko ikọlu kukuru rẹ nikan jẹ 0.5s nikan, eyiti o le pade awọn ibeere mimu fun laini iṣelọpọ iduroṣinṣin.
Iwọn Kekere, Rọrun lati Fi sori ẹrọ

Z-EFG-C65 ni lati gba ipo gbigbe ti gear rack + ball guide rail, iwọn ọja jẹ L90 * W90 * H178mm, o le jẹ rọ lati ṣeto ni ipo ti agbegbe kekere.


Ìdáhùn kíákíá, Ìpéye fún Ìṣàkóso Agbára

Àkókò tó kúrú jù tí ìkọlù kan bá jẹ́ 0.5s nìkan, ó lè ṣe iṣẹ́ ìdènà kíákíá, àwọn ẹ̀yà ìrù rẹ̀ lè yípadà nígbàkigbà, àwọn oníbàárà lè ṣàtúnṣe ìrù gẹ́gẹ́ bí ìbéèrè.
Ṣíṣe Àwọn Ìṣàkóso Púpọ̀, Rọrùn láti Ṣiṣẹ́

Iṣeto Z-EFG-C50 jẹ awọn ipo iṣakoso ti o rọrun, ti o ni ọpọlọpọ, pẹlu 485 (Modbus RTU), Pulse, I/O, o si ni ibamu pẹlu eto iṣakoso akọkọ PLC.

Ibudo Ibuwo ti Atunse Walẹ
Iṣẹ́ wa


Àwọn ẹ̀ka ọjà
-

DH Robotics SERVO Electrical Gripper AG SERIES – ...
-

DH Robotik SERVO Electrical Gripper PGS SERIES –...
-

DH RÓBÓTÌKÌ SERVO ELECTRIC GRIPPER RGI SERIES –...
-

DH RÓBÓTÌSÌ SERVO ELECTRIC GRIPPER PGC SERIES –...
-

HITBOT ELECTRIC GRIPPER jara – Z-EFG-12 Paral...
-

DH RÓBÓTÌSÌ SERVO ELECTRIC GRIPPER CG SERIES – ...