Ẹ̀RỌ IGBE ILẸ̀ HITBOT – Ẹ̀RỌ IGBE ILẸ̀ ...




Ẹ̀ka Àkọ́kọ́
Apá robot ilé-iṣẹ́ /Apá robot aláfọwọ́sowọ́pọ̀ / Gígé iná mànàmáná/Oníṣẹ́ ọgbọ́n/Àwọn ojútùú adaṣiṣẹ
Ohun elo
Àwọn roboti SCIC Z-EFG series jẹ́ ìwọ̀n kékeré pẹ̀lú ètò servo tí a ṣe sínú rẹ̀, èyí tí ó mú kí ó ṣeé ṣe láti ṣàṣeyọrí ìṣàkóso tí ó péye ti iyàrá, ipò, àti agbára ìdènà. Ètò ìdènà SCIC fún àwọn iṣẹ́ àdáṣe yóò jẹ́ kí o ṣí àwọn àǹfààní tuntun sílẹ̀ fún ṣíṣe àdáṣe àwọn iṣẹ́ tí o kò rò pé ó ṣeé ṣe.

Ẹ̀yà ara

·Ohun èlò ìdènà iná mànàmáná kékeré ṣùgbọ́n tó lágbára.
·A le rọpo awọn ebute lati pade awọn ibeere iṣẹ akanṣe oriṣiriṣi.
·Ó lè gbé àwọn nǹkan tó jẹ́ ẹlẹ́gẹ́ àti tó lè bàjẹ́, bíi ẹyin, àwọn ọ̀pá ìdánwò, àwọn òrùka, àti bẹ́ẹ̀ bẹ́ẹ̀ lọ.
·Ó yẹ fún àwọn ìṣẹ̀lẹ̀ tí kò ní orísun afẹ́fẹ́ (bíi àwọn yàrá ìwádìí, àti àwọn ilé ìwòsàn).
Apẹrẹ Pataki fun Apa Robot Six-Axis, Gripper Ina mọnamọna 8mm
Igbohunsafẹfẹ giga
Àkókò tó kúrú jùlọ fún ìlù kan ṣoṣo ni 0.1s
Ìgbésí ayé gígùn
Ẹgbẹẹgbẹ̀rún mílíọ̀nù kẹ̀kẹ́, kọjá afẹ́fẹ́ tó ń gbé kiri
Plug ki o si mu ṣiṣẹ
A ṣe apẹrẹ pataki funohun èlò ìkọ́lé iná mànàmáná mẹ́fà
Àwòrán Kékeré
Iṣeto kekere, o le ṣee lo fun aaye kekere lati dimu
A le yipada iru
A le yi iru rẹ pada lati pade awọn ibeere oriṣiriṣi
Ìdìmọ́ra Rírọ
Ó lè di àwọn nǹkan tó jẹ́ ẹlẹgẹ́ mú

● Ṣíṣe ìgbéga ìyípadà nínú yíyípadà àwọn ohun èlò ìdènà pneumatic pẹ̀lú àwọn ohun èlò ìdènà iná mànàmáná, ohun èlò ìdènà iná mànàmáná àkọ́kọ́ pẹ̀lú ètò servo tí a ti ṣepọ̀ ní China.
● Rírọ́pò pípé fún compressor afẹ́fẹ́ + àlẹ̀mọ́ + fáìlì solenoid + fáìlì throttle + gígé pneumatic
● Ìgbésí ayé iṣẹ́ ọ̀pọ̀lọpọ̀ àwọn kẹ̀kẹ́, ní ìbámu pẹ̀lú sílíńdà ilẹ̀ Japan àtijọ́



Ìlànà Ìṣàpèjúwe
Ẹ̀rọ ìdènà oníná mànàmáná tó ní ìka méjì tó jọra ń gbé ìdènà ró, ó sì lè gbá ẹyin, àwọn ọ̀pọ́, àti àwọn nǹkan míì tó jẹ́ ẹlẹ́gẹ́ mú. A lè so ẹ̀rọ ìdènà Z-EFG-FS pọ̀ mọ́ apá robot láti ṣẹ̀dá ìlà iṣẹ́-ṣíṣe aládàáṣe pátápátá.
- Ohun èlò ìdènà iná mànàmáná kékeré ṣùgbọ́n tó lágbára.
- A le rọpo awọn ebute lati pade awọn ibeere iṣẹ akanṣe oriṣiriṣi.
- Ó lè gbé àwọn nǹkan tó jẹ́ ẹlẹ́gẹ́ àti tó lè bàjẹ́, bíi ẹyin, àwọn ọ̀pá ìdánwò, àwọn òrùka, àti bẹ́ẹ̀ bẹ́ẹ̀ lọ.
- Ó yẹ fún àwọn ìṣẹ̀lẹ̀ tí kò ní orísun afẹ́fẹ́ (bíi àwọn yàrá ìwádìí, àti àwọn ilé ìwòsàn).
| Nọ́mbà Àwòṣe Z-EFG-FS | Àwọn ìpele |
| Líle gbogbo àrùn | 8mm |
| Agbára dídìmú | 8~20N (a le ṣatunṣe) |
| Àtúnṣe | ±0.02mm |
| Iwuwo mimu ti a ṣeduro | ≤ 0.3kg |
| Ipo gbigbe | Àgbékalẹ̀ jíà + ìtọ́sọ́nà ìyípo àgbélébùú |
| Àtúnṣe òróró àwọn èròjà tí ń gbéra | Ni gbogbo oṣu mẹfa tabi miliọnu kan awọn iṣipopada / akoko |
| Àkókò ìṣípò ìlù ọ̀nà kan | 0.1s |
| Iwọn iwọn otutu iṣiṣẹ | 5-55℃ |
| Iwọn ọriniinitutu iṣiṣẹ | RH35-80 (Kò sí yìnyín) |
| Ipò ìṣípo | Ìka ọwọ́ méjì ń gbéra ní ìpele tí ó wà ní ìlà-òrùn |
| Ìṣàkóso ìfàjẹ̀sí | No |
| Ṣíṣe àtúnṣe agbára ìfúnpọ̀ | A le ṣatunṣe |
| Ìwúwo | 0.3kg |
| Àwọn ìwọ̀n (L*W*H) | 67*67*101.9mm |
| Ipò olùdarí | Inu-inu |
| Agbára | 5W |
| Iru mọto | DC láìsí brush |
| Fólẹ́ẹ̀tì tí a fún ní ìwọ̀n | 24V ± 10% |
| Òkè ìṣàn omi | 0.6A |
| Apá robot oní-apá mẹ́fà tí a lè ṣe àtúnṣe | UR, Aubo |
Awakọ ti a ṣepọ ati Oluṣakoso
Z-EFG-FS jẹ́ ẹ̀rọ kékeré kan tí ó ní ètò servo tí a ti ṣepọ, ó kan nílò ẹ̀rọ mànàmáná kan tí ó lè rọ́pò ẹ̀rọ compressor + àlẹ̀mọ́ + ẹ̀rọ magnetic valve + ẹ̀rọ throttle + ẹ̀rọ gígé afẹ́fẹ́.


Ni ibamu pẹlu Six-Axis Robot Arm

Gígé iná mànàmáná Z-EFG-FS lè bá apá robot onígun mẹ́fà mu, láti mọ bí a ṣe lè fi kún un, ó ní ìlọ́po 8mm, agbára ìlọ́po jẹ́ 8-20N, agbára ìlọ́po àti agbára ìlọ́po rẹ̀ lè máa tẹ̀síwájú láti ṣàtúnṣe.
Àwòrán kékeré, Rọrùn láti fi sori ẹrọ

Ìwọ̀n ọjà Z-EFG-FS jẹ́ L67*W67*H101.9mm, àwòrán kékeré ni, ó lè rọrùn láti fi sínú àyè kékeré láti dì mọ́.


Yára láti Dáhùn, Ìṣàkóso Agbára Ìpéye

Àkókò ṣíṣí/típa jẹ́ 0.1s péré, ó lè yára láti bá àwọn iṣẹ́ ìdènà mu, a lè rọ́pò apá ìrù rẹ̀ ní ìrọ̀rùn, àwọn oníbàárà lè rọ̀ láti ṣàtúnṣe ìrù gẹ́gẹ́ bí ìbéèrè iṣẹ́ wọn.
Àwòrán Ìfisílẹ̀ Ìwọ̀n
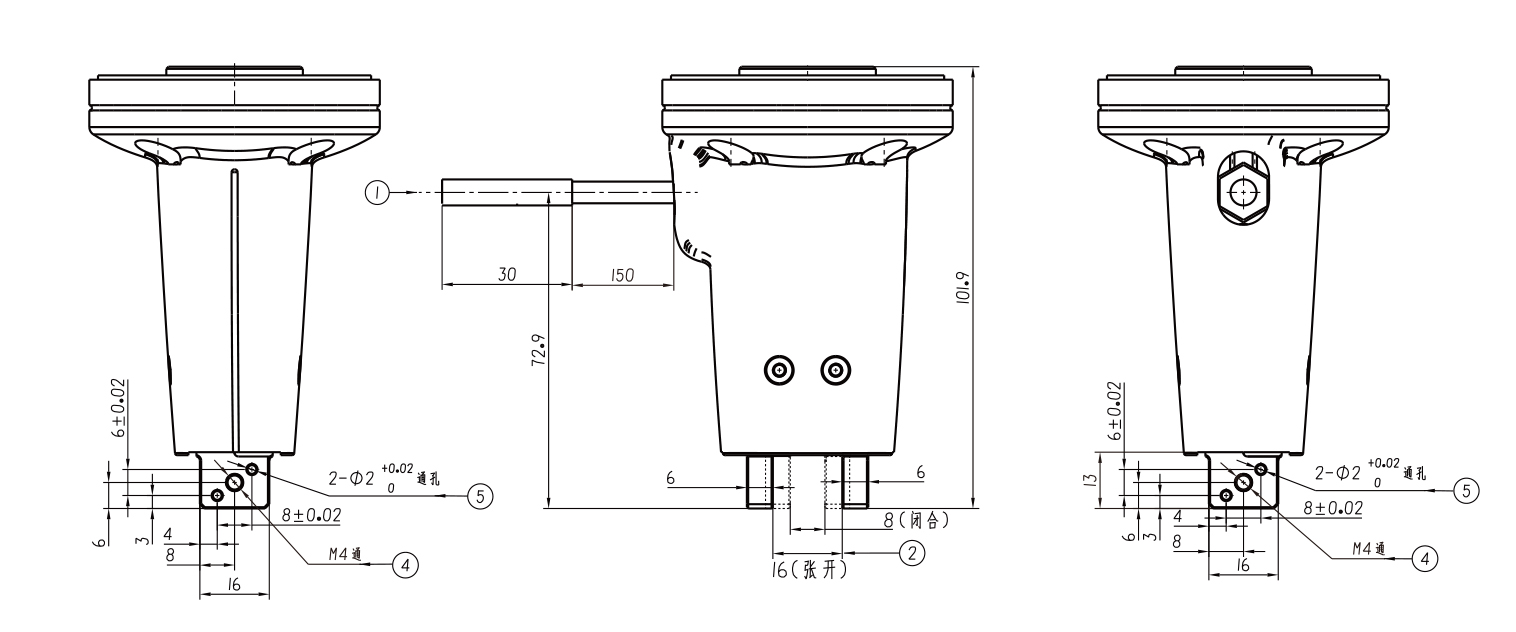
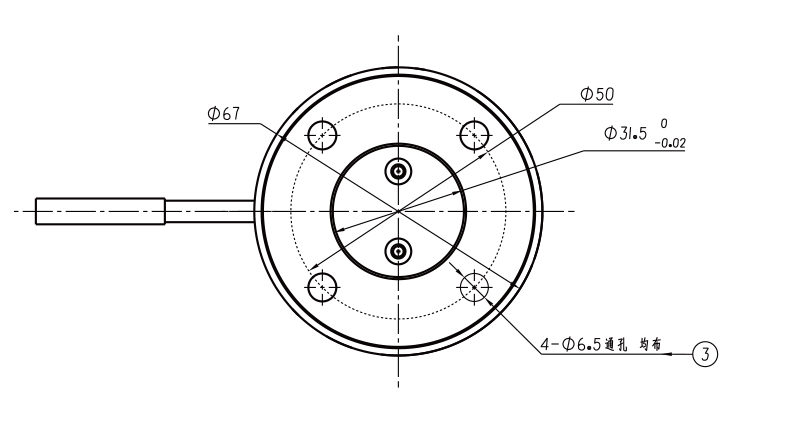
Awọn iwọn ina itanna
Folti ti a fun ni idiyele 24±2V
Lọ́wọ́lọ́wọ́ 0.4A

Iṣẹ́ wa





-300x255-300x300.png)

