Ẹ̀RỌ IGBE ILẸ̀ HITBOT – Ẹ̀RỌ IGBE ILẸ̀ ILẸ̀ ILẸ̀ ILẸ̀ ILẸ̀ Z-EFG-R



Ẹ̀ka Àkọ́kọ́
Apá robot ilé-iṣẹ́ /Apá robot aláfọwọ́sowọ́pọ̀ / Gígé iná mànàmáná/Oníṣẹ́ ọgbọ́n/Àwọn ojútùú adaṣiṣẹ
Ohun elo
Àwọn roboti SCIC Z-EFG series jẹ́ ìwọ̀n kékeré pẹ̀lú ètò servo tí a ṣe sínú rẹ̀, èyí tí ó mú kí ó ṣeé ṣe láti ṣàṣeyọrí ìṣàkóso tí ó péye ti iyàrá, ipò, àti agbára ìdènà. Ètò ìdènà SCIC fún àwọn iṣẹ́ àdáṣe yóò jẹ́ kí o ṣí àwọn àǹfààní tuntun sílẹ̀ fún ṣíṣe àdáṣe àwọn iṣẹ́ tí o kò rò pé ó ṣeé ṣe.

Ẹ̀yà ara

·Ohun èlò ìdènà iná mànàmáná kékeré ṣùgbọ́n tó lágbára.
·A le rọpo awọn ebute lati pade awọn ibeere iṣẹ akanṣe oriṣiriṣi.
·Ó lè gbé àwọn nǹkan tó jẹ́ ẹlẹ́gẹ́ àti tó lè bàjẹ́, bíi ẹyin, àwọn ọ̀pá ìdánwò, àwọn òrùka, àti bẹ́ẹ̀ bẹ́ẹ̀ lọ.
·Ó yẹ fún àwọn ìṣẹ̀lẹ̀ tí kò ní orísun afẹ́fẹ́ (bíi àwọn yàrá ìwádìí, àti àwọn ilé ìwòsàn).
Eto Servo ti a ṣepọ ti a lo fun ọpọlọpọ awọn ibeere
Agbára Ìfúnpọ̀ Ńlá
Agbára ìfúnpọ̀: 80N,
ìkọlù: 20mm
Iṣakoso Ipese
Àtúnṣe: ±0.02mm
Plug ki o si mu ṣiṣẹ
A ṣe apẹrẹ pataki funohun èlò ìkọ́lé iná mànàmáná mẹ́fà
Oluṣakoso naa wa ni inu
Ibora agbegbe kekere, o rọrun lati ṣepọ.
A le yipada iru
A le yi iru rẹ pada si lilo fun awọn ibeere oriṣiriṣi.
Ìdìmọ́ra Rírọ
Ó lè di àwọn nǹkan tó jẹ́ ẹlẹgẹ́ mú

● Ṣíṣe ìgbéga ìyípadà nínú yíyípadà àwọn ohun èlò ìdènà pneumatic pẹ̀lú àwọn ohun èlò ìdènà iná mànàmáná, ohun èlò ìdènà iná mànàmáná àkọ́kọ́ pẹ̀lú ètò servo tí a ti ṣepọ̀ ní China.
● Rírọ́pò pípé fún compressor afẹ́fẹ́ + àlẹ̀mọ́ + fáìlì solenoid + fáìlì throttle + gígé pneumatic
● Ìgbésí ayé iṣẹ́ ọ̀pọ̀lọpọ̀ àwọn kẹ̀kẹ́, ní ìbámu pẹ̀lú sílíńdà ilẹ̀ Japan àtijọ́




Ìlànà Ìṣàpèjúwe
Z-EFG-R jẹ́ ẹ̀rọ ìdènà iná mànàmáná oníróbọ́ọ̀tì pẹ̀lú olùdarí tí a ṣe sínú rẹ̀ àti ọ̀pọ̀lọpọ̀ iṣẹ́ ní ọ̀kan. Ó kéré ní ìwọ̀n, ṣùgbọ́n ó lágbára ní iṣẹ́.
● Ohun èlò ìdènà iná mànàmáná kékeré kan tí ó lágbára ṣùgbọ́n tí ó lágbára.
●A le rọpo awọn ebute lati pade awọn ibeere iṣẹ akanṣe oriṣiriṣi.
● Ó lè gbé àwọn nǹkan tó jẹ́ ẹlẹ́gẹ́ àti tó lè bàjẹ́, bí ẹyin, àwọn ọ̀pá ìdánwò, òrùka, àti bẹ́ẹ̀ bẹ́ẹ̀ lọ.
● Ó yẹ fún àwọn ìṣẹ̀lẹ̀ tí kò ní orísun afẹ́fẹ́ (bíi àwọn yàrá ìwádìí, àti àwọn ilé ìwòsàn).
Z-EFG-R jẹ́ ẹ̀rọ kékeré kan tí ó ní ètò servo tí a ṣepọ, ó lè rọ́pò fifa + àlẹ̀mọ́ + iye magnetic elekitiron + throttle valve + afẹ́fẹ́ gripper.
| Nọ́mbà Àwòṣe Z-EFG-R | Àwọn ìpele |
| Líle gbogbo àrùn | 20mm |
| Agbára dídìmú | 80N |
| Àtúnṣe | ±0.02mm |
| Iwuwo mimu ti a ṣeduro | 0.8kg |
| Ipo gbigbe | Àgbékalẹ̀ jíà + ìtọ́sọ́nà ìyípo àgbélébùú |
| Àtúnṣe òróró àwọn èròjà tí ń gbéra | Ni gbogbo oṣu mẹfa tabi miliọnu kan awọn iṣipopada / akoko |
| Àkókò ìṣípò ìlù ọ̀nà kan | 0.45s |
| Iwọn iwọn otutu iṣiṣẹ | 5-55℃ |
| Iwọn ọriniinitutu iṣiṣẹ | RH35-80 (Kò sí yìnyín) |
| Ipò ìṣípo | Ìka ọwọ́ méjì ń gbéra ní ìpele tí ó wà ní ìlà-òrùn |
| Ìṣàkóso ìfàjẹ̀sí | A le ṣatunṣe |
| Ṣíṣe àtúnṣe agbára ìfúnpọ̀ | A le ṣatunṣe |
| Ìwúwo | 0.5kg |
| Àwọn ìwọ̀n (L*W*H) | 68*68*132.7mm |
| Ipò olùdarí | Inu-inu |
| Agbára | 5W |
| Iru mọto | DC láìsí brush |
| Fólẹ́ẹ̀tì tí a fún ní ìwọ̀n | 24V |
| Òkè ìṣàn omi | 1A |
| Apá robot oní-apá mẹ́fà tí a lè ṣe àtúnṣe | UR, Aubo |
Iwakọ ati Oluṣakoso wa ni itumọ-inu
Z-EFG-R jẹ́ ẹ̀rọ kékeré kan tí ó ní ètò servo tí a ṣepọ, ó lè rọ́pò ẹ̀rọ fifa afẹ́fẹ́ + àlẹ̀mọ́ + ẹ̀rọ itanna magnetic + ẹ̀rọ throttle + ẹ̀rọ afẹ́fẹ́.


Ni ibamu pẹlu Six-Axis Robot Arm
Agbára ìdènà náà lè bá apá robot onígun mẹ́fà mu, láti lè ṣe àgbékalẹ̀ rẹ̀, ó ní ìlọ́po gígùn 20mm, agbára ìdènà náà jẹ́ 80N, a lè ṣe àtúnṣe agbára ìdènà àti agbára ìdènà rẹ̀.
Àwòrán kékeré, Rọrùn láti fi sori ẹrọ
Ìwọ̀n Z-EFG-R jẹ́ L68*W68* H132.7mm, ìṣètò rẹ̀ kéré, ó ń ṣe àtìlẹ́yìn fún àwọn ọ̀nà ìfisílò púpọ̀, olùdarí náà wà nínú rẹ̀, àyè kékeré ló ń gbà, ó rọrùn láti lò fún onírúurú ìbéèrè fún iṣẹ́ ìfọwọ́sowọ́pọ̀.

Kíákíá láti dáhùn, Ìṣàkóso Ìpéye
Àkókò ìṣípo tó kúrú jùlọ fún ìlù kan ṣoṣo ni 0.45s, ó ṣeé tún ṣe é ṣe ±0.02mm, a lè yí apá ìrù rẹ̀ padà ní ìrọ̀rùn, àwọn oníbàárà lè di ohun náà mú gẹ́gẹ́ bí ìbéèrè.
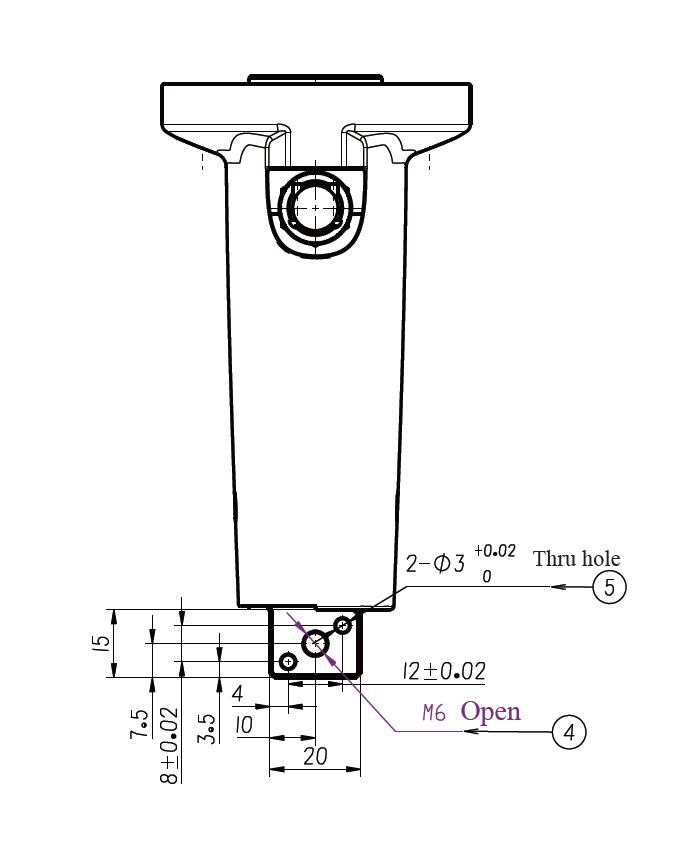
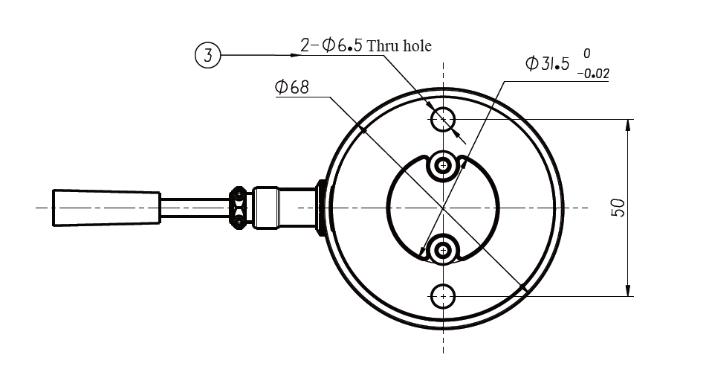
Àwòrán Ìfisílẹ̀ Ìwọ̀n
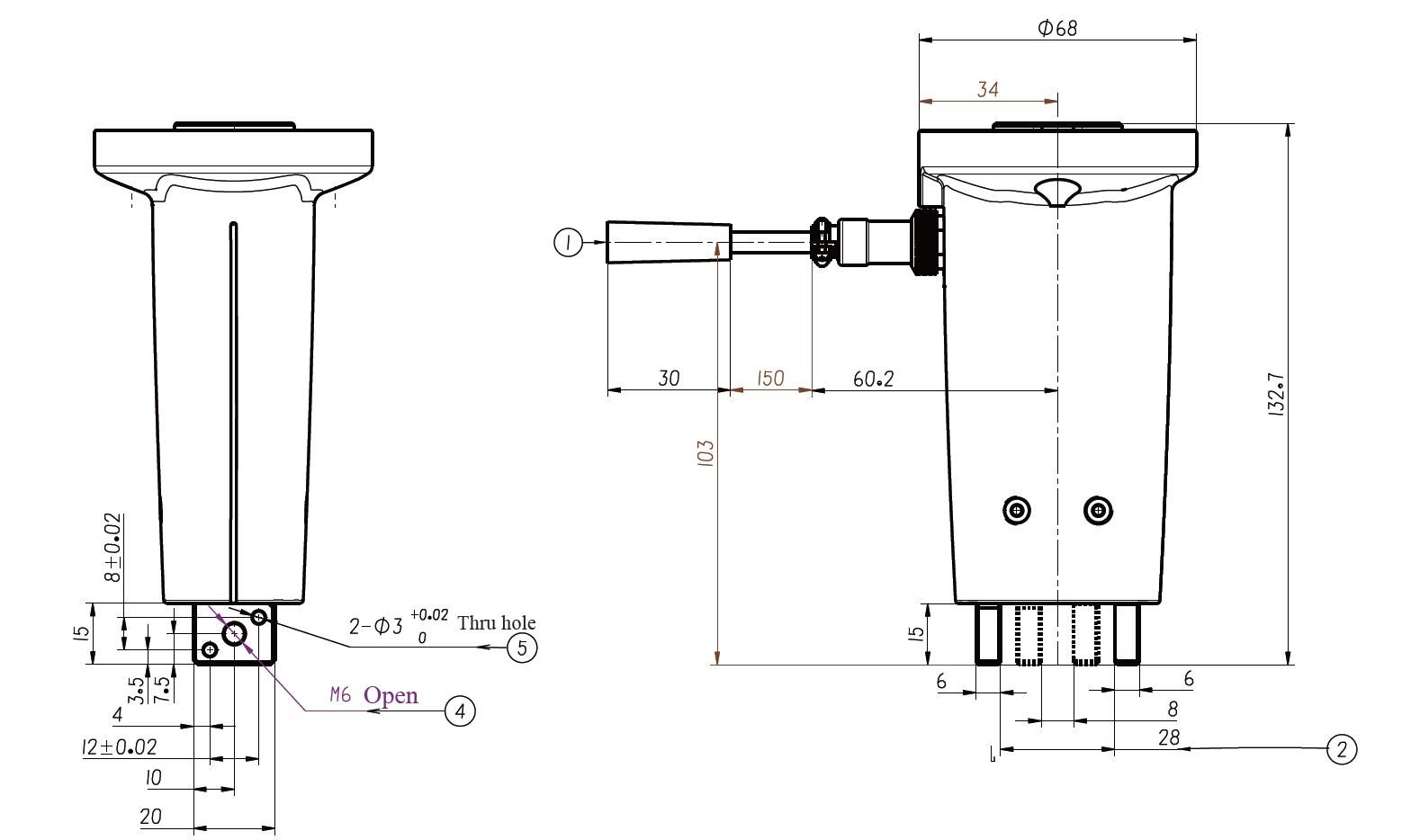
① RKMV8-354 Pẹpẹ ọkọ̀ òfurufú márùn-ún sí RKMV8-354
② Ìlànà ti gripper ina jẹ 20mm
③ Ipo fifi sori ẹrọ, lo awọn skru M6 meji lati sopọ mọ flange ni opin apa robot UR
④ Ipo fifi sori ẹrọ, ipo fifi sori ẹrọ ohun elo (skru M6)
⑤ Ipo fifi sori ẹrọ, ipo fifi sori ẹrọ ohun elo (awọn ihò pin onirin mẹta)
Awọn iwọn ina itanna
Folti ti a fun ni idiyele 24±2V
Lọ́wọ́lọ́wọ́ 0.4A

Iṣẹ́ wa







