Ẹ̀RỌ IGBIN ILẸ̀ HITBOT – Z-ECG-10 Ẹ̀rọ IGBIN ILẸ̀ Mẹ́ta




Ẹ̀ka Àkọ́kọ́
Apá robot ilé-iṣẹ́ /Apá robot aláfọwọ́sowọ́pọ̀ / Gígé iná mànàmáná/Oníṣẹ́ ọgbọ́n/Àwọn ojútùú adaṣiṣẹ
Ohun elo

Ẹ̀yà ara

·Wiwa idimu silẹ, iṣẹ iṣelọpọ agbegbe
·Agbara, ipo, iṣakoso iyara, iṣakoso deede nipasẹ Modbus
·Ohun ìdènà ìka mẹ́ta tí ó wà ní àárín
·Adarí tí a ṣe sínú rẹ̀: ìtẹ̀sẹ̀ kékeré, ìṣọ̀kan tí ó rọrùn
·Ipo Iṣakoso: 485 (Modbus RTU), I/O
Ẹ̀rọ ìfọwọ́kan iná mànàmáná mẹ́ta tí ó rọrùn láti di àwọn ohun tí a fi ń so mọ́ sílíńdà náà mú
Iṣẹ́ Gíga
Agbára ìfúnpọ̀: 3-10N,
Agbara giga
Iṣẹ́ tó péye sí Ìṣàkóso
Modbus le ṣakoso rẹ
Ó gbọ́n sí Ìdáhùn
O ni iṣẹ pf clamping drop detection output agbegbe.
Adarí tí a ṣe sínú rẹ̀
Ibora aaye kekere, o rọrun lati ṣepọ.
Àwọn Ìṣàkóso Onírúurú
Atilẹyin 485 (Modbus) I/O
Gripper ìka mẹ́ta
Ìka mẹ́ta láti dimọ́, ó yẹ fún onírúurú àkókò




Ìlànà Ìṣàpèjúwe
| Àwòṣe Nọ́mbà Z-ECG-10 | Àwọn ìpele |
| Àròpọ̀ ọpọlọ | 10mm |
| Agbára dídìmú | 3-10N |
| Àtúnṣe | ±0.03mm |
| Iwuwo mimu ti a ṣeduro | Àṣejù. 0.2kg |
| Gbigbe ipo | Àpótí àti Pinion + Rírin Ìtọ́sọ́nà Bọ́ọ̀lù |
| Àtúnṣe òróró àwọn èròjà tí ń gbéra | Ni gbogbo oṣu mẹfa tabi miliọnu kan awọn iṣipopada / akoko |
| Àkókò ìṣípò ìlù ọ̀nà kan | 0.3s |
| Iwọn iwọn otutu iṣiṣẹ | 5-55℃ |
| Iwọn ọriniinitutu iṣiṣẹ | RH35-80(Ko si yinyin) |
| Blacklash | Ẹ̀gbẹ́ kan ṣoṣo: 0.2mm |
| Ìṣàkóso ìfàjẹ̀sí | A le ṣatunṣe |
| Ṣíṣe àtúnṣe agbára ìfúnpọ̀ | A le ṣatunṣe |
| Ìwúwo | 0.5kg |
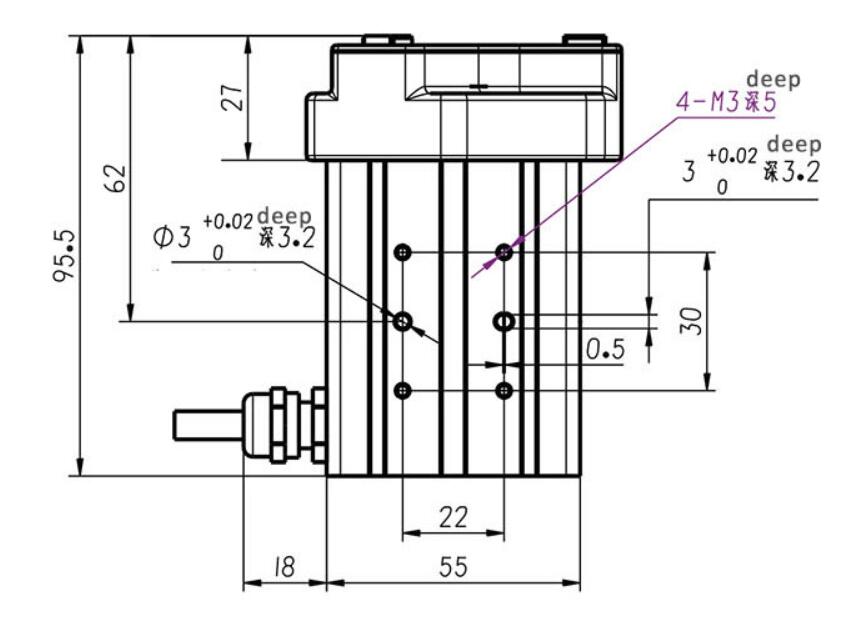
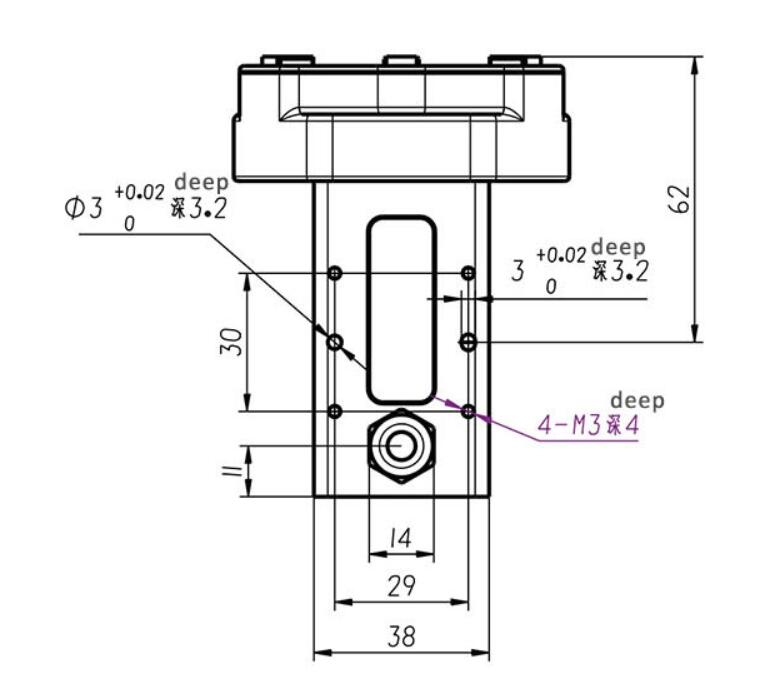
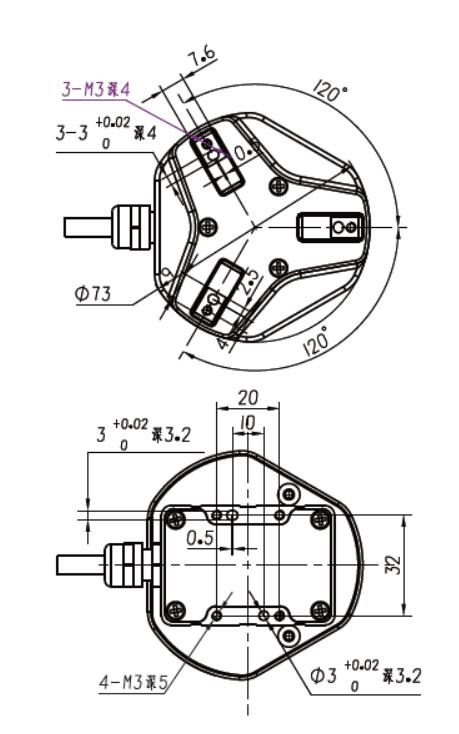
| Àwọn ìwọ̀n(L*W*H) | 73*73*95.5mm |
| Ipele Idaabobo | IP20 |
| Iru mọto | Moto ina mọnamọna Servo |
| Òkè Ìṣàn omi | 0.6A |
| Fólẹ́ẹ̀tì tí a fún ní ìwọ̀n | 24V ±10% |
| Iduro lọwọlọwọ | 0.3A |
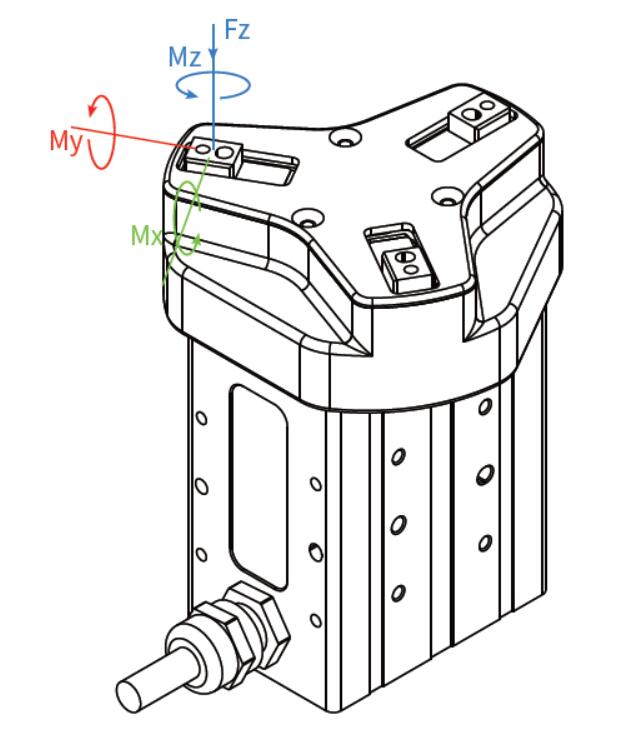
| Ẹrù tí a lè gbà láàyè ní ìtọ́sọ́nà inaro | |
| Fz: | 70N |
| Ìyípo tí a lè gbà láàyè | |
| Ọ̀gágun: | 0.64 Nm |
| Mi: | 0.4 Nm |
| Mz: | 0.48 Nm |
Ìpéye sí Ipò, Ìka Mẹ́ta Gripper
Gígé iná ìka mẹ́ta Z-ECG-10, ó ṣeé tún ṣe àtúnṣe rẹ̀ jẹ́ ±0.03mm, ó jẹ́ ìka mẹ́ta láti dì mọ́ ara rẹ̀, ó sì ní iṣẹ́ wíwá ìfàsẹ́yìn, ìjáde agbègbè, èyí tí ó lè dára jù láti dì mọ́ àwọn ohun tí a fi sílíńdà ṣe.


Adarí Tí a ṣe sínú rẹ̀, Ìṣọ̀kan Gíga
Ààbò tó dára fún ẹrù tó pọ̀jù lójúkan, láti rí i dájú pé ẹ̀rọ iná mànàmáná náà kò dáwọ́ dúró tàbí àwọn ipò àìdára mìíràn. Ó jẹ́ olùdarí tí a ṣe sínú rẹ̀, a lè ṣàkóso agbára, bit àti iyàrá rẹ̀, ó bo ibi iṣẹ́ kékeré, ó sì rọrùn láti ṣepọ.
Àwòrán kékeré, Rọrùn láti fi sori ẹrọ

Z-ECG-10 ni lati gba iru gbigbe ti rack ati pinion + linear guide, iwọn rẹ jẹ L73 * W73 * H109, iwuwo jẹ 0.65kg nikan, eto rẹ jẹ kekere, o ṣe atilẹyin fun awọn iru fifi sori ẹrọ pupọ, o rọrun lati pari ọpọlọpọ awọn iṣẹ-ṣiṣe clamping.


Yára láti Dáhùn, Ìṣàkóso Agbára Ìpéye
Ìlànà tó kúrú jù ni 0.3s, agbára ìdènà jẹ́ 3-10N, ìdènà ìdènà jẹ́ 10mm, ìwọ̀n rẹ̀ jẹ́ nípa 0.2kg, èyí tó lè mú kí ó péye tó láti dì mọ́.
Ṣíṣe Àwọn Ìṣàkóso Púpọ̀, Rọrùn láti Ṣiṣẹ́

Modbus le ṣakoso Z-ECG-10 deedee, o rọrun lati pin, lati lo ibaraẹnisọrọ ti Digital I/O, o kan nilo okun waya kan lati so ON/OFF pọ, o tun baamu pẹlu eto iṣakoso akọkọ PLC.

Ibudo Ibuwo ti Atunse Walẹ
Iṣẹ́ wa


Àwọn ẹ̀ka ọjà
-

HITBOT ELECTRIC GRIPPER jara – Z-EFG-26 Paral...
-

DH RÓBÓTÌSÌ SERVO ELECTRIC GRIPPER PGC SERIES –...
-

Ẹ̀RỌ ILẸ̀ ÍŃTÁNẸ́Ẹ̀TÌ HITBOT – Àkójọpọ̀ Z-EFG-FS...
-

DH RÓBÓTÌSÌ SERVO ELECTRIC GRIPPER PGE SERIES –...
-

HITBOT ELECTRIC GRIPPER jara – Z-EFG-20 Paral...
-

DH RÓBÓTÌSÌ SERVO ELECTRIC GRIPPER PGE SERIES –...