Ẹ̀RỌ ...




Ẹ̀ka Àkọ́kọ́
Apá robot ilé-iṣẹ́ /Apá robot aláfọwọ́sowọ́pọ̀ / Gígé iná mànàmáná/Oníṣẹ́ ọgbọ́n/Àwọn ojútùú adaṣiṣẹ
Ohun elo
Àwọn roboti SCIC Z-EFG series jẹ́ ìwọ̀n kékeré pẹ̀lú ètò servo tí a ṣe sínú rẹ̀, èyí tí ó mú kí ó ṣeé ṣe láti ṣàṣeyọrí ìṣàkóso tí ó péye ti iyàrá, ipò, àti agbára ìdènà. Ètò ìdènà SCIC fún àwọn iṣẹ́ àdáṣe yóò jẹ́ kí o ṣí àwọn àǹfààní tuntun sílẹ̀ fún ṣíṣe àdáṣe àwọn iṣẹ́ tí o kò rò pé ó ṣeé ṣe.

Ẹ̀yà ara

· Wiwa fifa silẹ, iṣẹ iṣelọpọ agbegbe
· A le ṣakoso agbara, ipo ati iyara ni deede nipasẹ Modbus
·Ìgbésí ayé gígùn: ọ̀kẹ́ àìmọye àwọn ìyípo, tí ó ju àwọn èékánná afẹ́fẹ́ lọ
· Olùdarí tí a ṣe sínú rẹ̀: ìtẹ̀síwájú kékeré, ìṣọ̀kan tí ó rọrùn
·Ipo Iṣakoso: 485 (Modbus RTU), I/O
Ìfúnpọ̀ jẹ́ 35mm, Agbára ìfúnpọ̀ jẹ́ 50N. Ó bá apá robot 6-Axis mu.
Igbohunsafẹfẹ giga
Àkókò ìkọlù tó kúrú jùlọ ni 0.5s
Pípé Gíga
Àtúnṣe jẹ́ ±0.03mm
Ẹrù Gíga
Ìdámọ̀ràn fún ìwọ̀n ìfúnpọ̀ ≤1kg
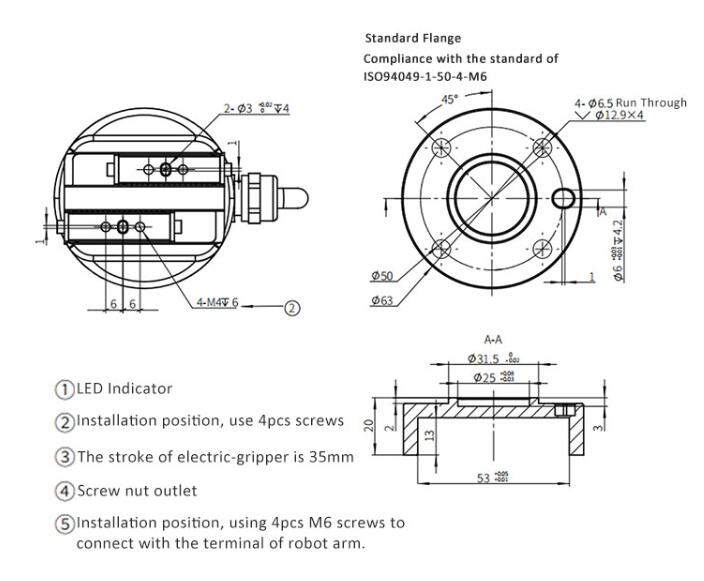
Plug ki o si mu ṣiṣẹ
Ọpá ina mọnamọna pataki fun robot 6-axis
Ìrù Tó Ń Yípadà
Ìparí ìrù rẹ̀ lè yípadà láti bá àwọn àìní tó yàtọ̀ síra mu
Ìdìmọ́ra Rírọ
Ó lè di àwọn nǹkan tó jẹ́ ẹlẹ́gẹ́ àti tó ti díbàjẹ́ mú

● Ṣíṣe ìgbéga ìyípadà nínú yíyípadà àwọn ohun èlò ìdènà pneumatic pẹ̀lú àwọn ohun èlò ìdènà iná mànàmáná, ohun èlò ìdènà iná mànàmáná àkọ́kọ́ pẹ̀lú ètò servo tí a ti ṣepọ̀ ní China.
● Rírọ́pò pípé fún compressor afẹ́fẹ́ + àlẹ̀mọ́ + fáìlì solenoid + fáìlì throttle + gígé pneumatic
● Ìgbésí ayé iṣẹ́ ọ̀pọ̀lọpọ̀ àwọn kẹ̀kẹ́, ní ìbámu pẹ̀lú sílíńdà ilẹ̀ Japan àtijọ́



Ìlànà Ìṣàpèjúwe
| Nọ́mbà Àwòṣe Z-EFG-C35 | Àwọn ìpele |
| Líle gbogbo àrùn | 35mm le ṣatunṣe |
| Agbára dídìmú | A le ṣatunṣe 15-50N |
| Àtúnṣe | ±0.03mm |
| Iwuwo mimu ti a ṣeduro | ≤1kg |
| Ipo gbigbe | Àpótí jíà + ìtọ́sọ́nà oníyípo |
| Àtúnṣe òróró àwọn èròjà tí ń gbéra | Ni gbogbo oṣu mẹfa tabi awọn iṣipopada miliọnu kan / akoko |
| Àkókò ìṣípò ìlù ọ̀nà kan | 0.5s |
| Ipò ìṣípo | Ìka ọwọ́ méjì ń gbéra ní ìpele tí ó wà ní ìlà-òrùn |
| Ìwúwo | 0.5kg |
| Àwọn ìwọ̀n (L*W*H) | 63*63*95mm |
| Fóltéèjì iṣiṣẹ́ | 24V ± 10% |
| Iye lọwọlọwọ ti a ṣe ayẹwo | 0.3A |
| Òkè ìṣàn omi | 1A |
| Agbára | 8W |
| Ẹgbẹ́ ààbò | IP20 |
| Iru mọto | DC láìsí brush |
| Iwọn iwọn otutu iṣiṣẹ | 5-55℃ |
| Iwọn ọriniinitutu iṣiṣẹ | RH35-80 (Ko si yìnyín) |

| Ẹrù tí a lè gbà láàyè ní ìtọ́sọ́nà inaro | |
| Fz: | 150N |
| Ìyípo tí a lè gbà láàyè | |
| Ọ̀gágun: | 2.5 Nm |
| Mi: | 2 Nm |
| Mz: | 3 Nm |
Iwakọ ati Adarí ti a ṣepọ sinu
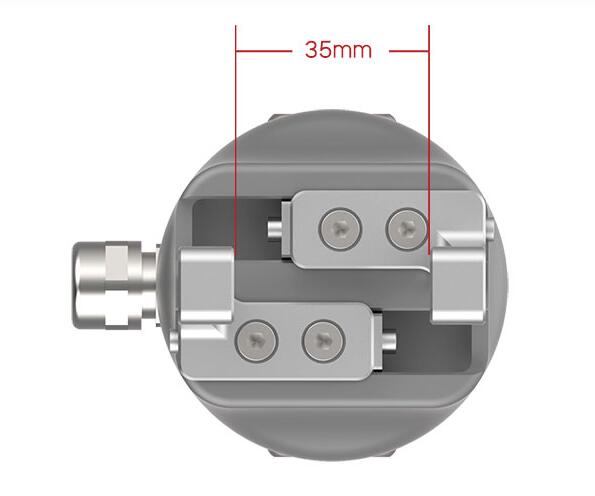
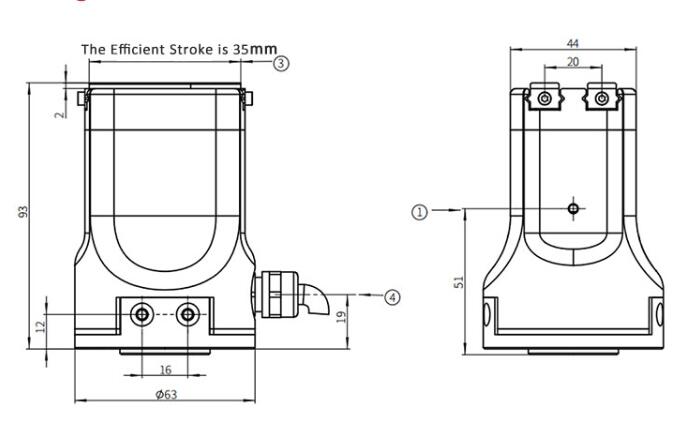
Gígé iná mànàmáná Z-EFG-C35 ní ètò servo tí a ṣepọ nínú rẹ̀, gbogbo ìgbésẹ̀ rẹ̀ jẹ́ 35mm, agbára ìdènà jẹ́ 15-50N, agbára ìdènà àti agbára ìdènà rẹ̀ ṣeé ṣàtúnṣe, àti pé ó ṣeé tún ṣe é ṣe ±0.03mm.

Ni ibamu pẹlu Six-Axis Robot Arm

Ọja naa ni ibamu pẹlu apa robot 6-axis, lati ṣe aṣeyọri plug ati play, akoko ikọlu kukuru julọ jẹ 0.5s nikan, lati pade ibeere dimole iyara ati iduroṣinṣin fun laini iṣelọpọ.
Iwọn Kekere, Rọrun lati Fi sori ẹrọ

Iwọn ọja Z-EFG-C35 jẹ L63*W63*H95mm nikan, o kere, o si le fi sii ni agbegbe ti o nipọn.


Ìdáhùn kíákíá, Ìpéye fún Ìṣàkóso Agbára

Iru iṣipopada rẹ̀ jẹ́ ìka méjì-tí ó jọra, IP20 tí kò ní omi, apá ìdènà ebute rẹ̀ lè yípadà nígbàkigbà, àwọn oníbàárà lè ṣàtúnṣe ìdènà náà gẹ́gẹ́ bí ìbéèrè ìṣelọ́pọ́.
Ṣíṣe Àwọn Ìṣàkóso Púpọ̀, Rọrùn láti Ṣiṣẹ́

Iṣeto Z-EFG-C35 jẹ awọn ipo iṣakoso ti o rọrun, ti o ni ọpọlọpọ, pẹlu 485 (Modbus RTU), Pulse, I/O, o si ni ibamu pẹlu eto iṣakoso akọkọ PLC.

Ibudo Ibudo ti Atunse Walẹ
Iṣẹ́ wa



-300x2551-300x300.png)



