Ẹ̀RỌ ÌYÍPADÀ KÍÁKÍÁ – QCA-S500 Ẹ̀rọ ÌYÍPADÀ KÍÁKÍÁ ní Ìparí Rọ́bọ́ọ̀tì kan


Ẹ̀ka Àkọ́kọ́
Ẹ̀rọ Ayípadà Ohun Èlò Robot / Ẹ̀rọ Ayípadà Ohun Èlò (EOAT) / Ètò Àyípadà Kíákíá / Ẹ̀rọ Ayípadà Ohun Èlò Automatic / Ìfọwọ́sowọ́pọ̀ Ohun Èlò Robot / Ẹ̀gbẹ́ Robot / Ẹ̀gbẹ́ Gripper / Ìyípadà Ohun Èlò / Ìtújáde Kíákíá / Ẹ̀rọ Ayípadà Ohun Èlò Pneumatic / Ẹ̀rọ Ayípadà Ohun Èlò Iná / Ẹ̀rọ Ayípadà Ohun Èlò Hydraulic / Ẹ̀rọ Ayípadà Ohun Èlò Precision / Ẹ̀rọ Títìpa Ààbò / Olùṣe Àṣeyọrí Ìparí / Àdáṣe / Ìyípadà Ohun Èlò / Pàṣípààrọ̀ Ohun Èlò / Àdáṣe Ohun Èlò Iṣẹ́ / Ìṣiṣẹ́ Ọkọ̀ / Ohun Èlò ...
Ohun elo
A lo End-of-Arm Tooling (EOAT) ni ọpọlọpọ awọn ile-iṣẹ bii iṣelọpọ ọkọ ayọkẹlẹ, itanna 3C, awọn iṣẹ akanṣe, imuda abẹrẹ, apoti ounjẹ ati oogun, ati sisẹ irin. Awọn iṣẹ akọkọ rẹ pẹlu mimu iṣẹ-ṣiṣe, alurinmorin, fifa omi, ayewo, ati iyipada irinṣẹ iyara. EOAT mu ṣiṣe iṣelọpọ, irọrun, ati didara ọja pọ si ni pataki, eyiti o jẹ ki o jẹ apakan pataki ti adaṣiṣẹ ile-iṣẹ ode oni.
Ẹ̀yà ara
Pípéye gíga
Ẹ̀gbẹ́ àtúnṣe piston náà ló ń ṣe ipa ipò, èyí tó ń fúnni ní ìṣedéédé ipò tó ga jùlọ. Àwọn ìdánwò cycle mílíọ̀nù kan fihàn pé ìṣedéédé gidi ga ju iye tí a gbà níyànjú lọ.
Agbára gíga
Piston titiipa pẹlu opin silinda nla ni agbara titiipa to lagbara, ẹrọ iyara robot SCIC ni agbara idena iyipo to lagbara. Nigbati o ba n tiipa, ko ni si gbigbọn nitori iṣipopada iyara giga, nitorinaa yago fun ikuna titiipa ati rii daju pe o peye ipo ti o tun ṣe deede.
Iṣẹ́ gíga
A lo ilana titiipa pẹlu apẹrẹ dada onigun pupọ, awọn paati edidi gigun ati iwadii olubasọrọ rirọ didara giga lati rii daju pe asopọ sunmọ ti modulu ifihan agbara.



Ìlànà Ìṣàpèjúwe
| Ẹ̀rọ Ìyípadà Kíákíá | ||||
| Àwòṣe | Ẹrù tó pọ̀ jùlọ | Ìpéye ṣíṣe àtúnṣe (X, Y&Z) | Agbára Títìpa@80Psi (5.5Bar) | Ìwúwo ọjà |
| QCA-S500 | 500kg | ±0.015mm | 38000N | 23.4kg |

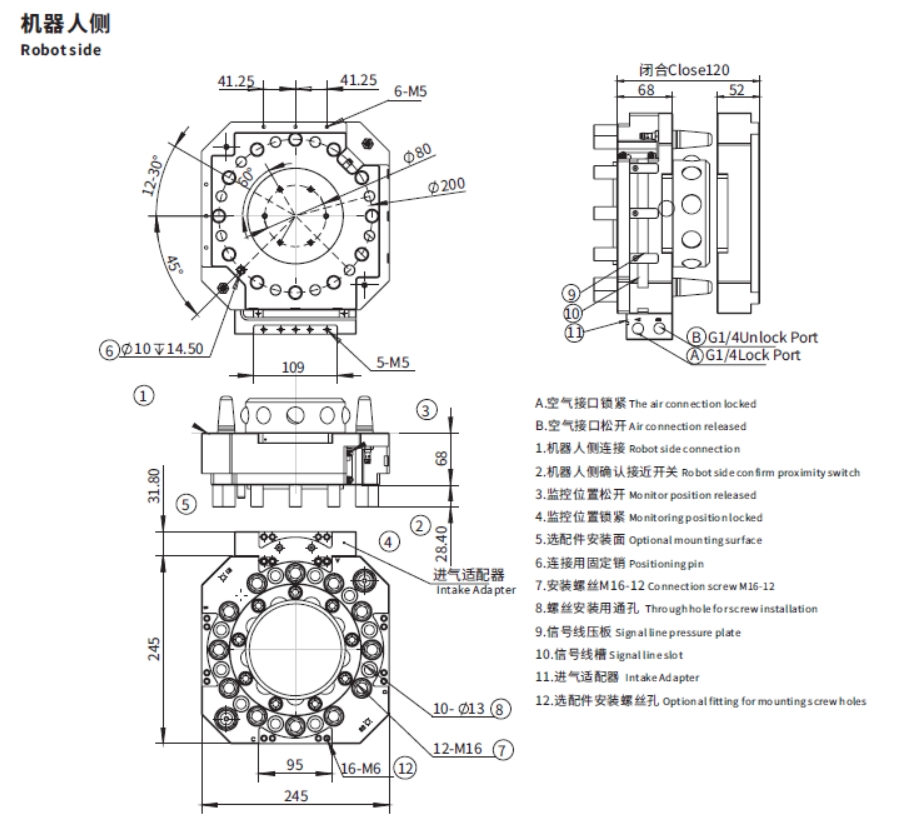
Ẹ̀gbẹ́ Rọ́bọ́ọ̀tì
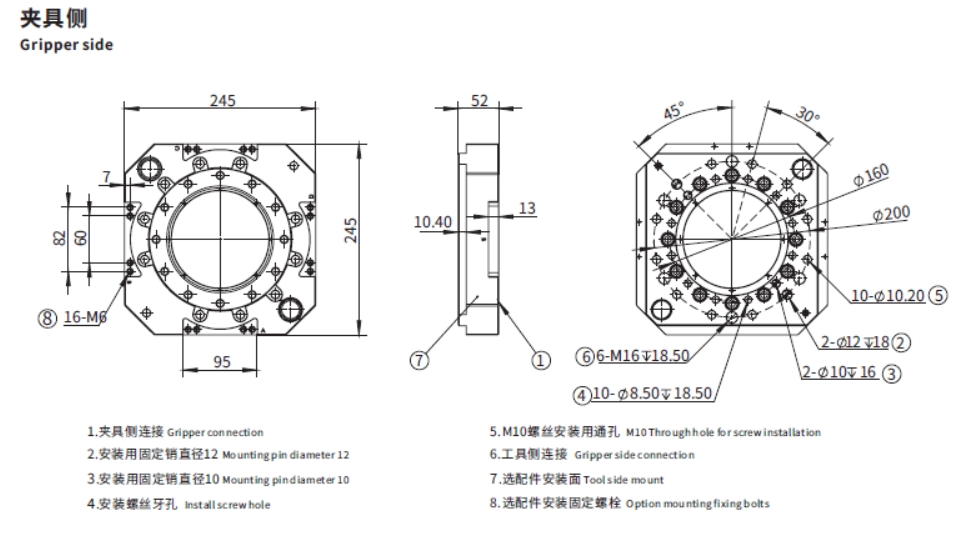
Ẹ̀gbẹ́ gripper
Módùù tó wúlò
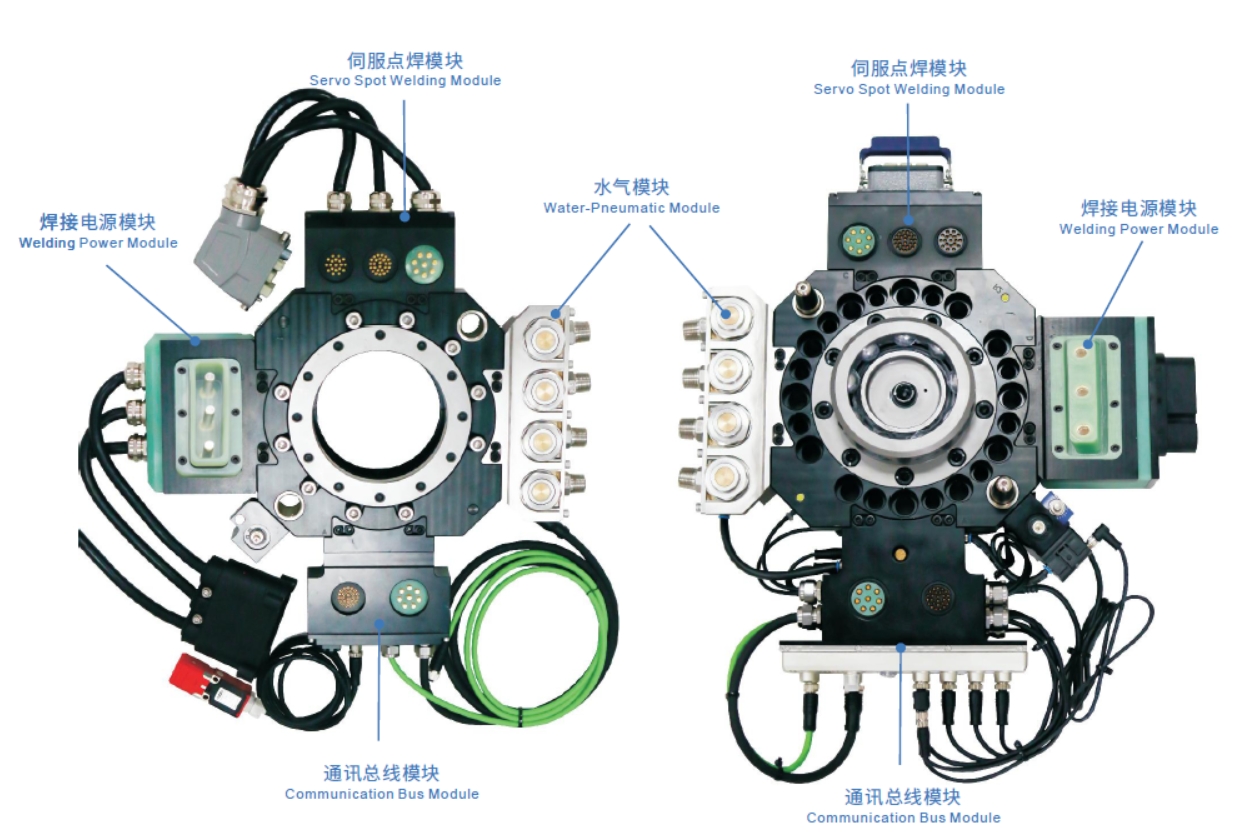
Modulu Agbara Alurinmorin
| Orukọ Ọja | Àwòṣe | PN |
| Modulu Agbara Alurinmorin ẹgbẹ robot | QCSM-03R | 7.Y02069 |
| Modulu Agbara Alurinmorin ẹgbẹ Gripper | QCSM-03G | 7.Y02070 |
Modulu Ifaagun Pneumatic
| Orukọ Ọja | Àwòṣe | PN |
| Ẹ̀gbẹ́ robot tí ó ń polongo ara rẹ̀ fún Pneumatic Extension Module | QCAM-08G38R | 7.Y02051 |
| Ẹ̀gbẹ́ Gripper tí ó ń polongo ara rẹ̀ fún Pneumatic Extension Module | QCAM-08G38G | 7.Y02052 |
Módù Ọ̀nà Omi
| Orukọ Ọja | Àwòṣe | PN |
| Módùùlù ẹ̀gbẹ́ robot Waterway | QCWM-04R1 | 7.Y02071 |
| Módù Gripper ẹ̀gbẹ́ Waterway | QCWM-04G1 | 7.Y02072 |
Iṣẹ́ wa







