Ẹ̀RỌ ...



Ẹ̀ka Àkọ́kọ́
Apá robot ilé-iṣẹ́ /Apá robot aláfọwọ́sowọ́pọ̀ / Gígé iná mànàmáná/Oníṣẹ́ ọgbọ́n/Àwọn ojútùú adaṣiṣẹ
Ohun elo
Àwọn roboti SCIC Z-EFG series jẹ́ ìwọ̀n kékeré pẹ̀lú ètò servo tí a ṣe sínú rẹ̀, èyí tí ó mú kí ó ṣeé ṣe láti ṣàṣeyọrí ìṣàkóso tí ó péye ti iyàrá, ipò, àti agbára ìdènà. Ètò ìdènà SCIC fún àwọn iṣẹ́ àdáṣe yóò jẹ́ kí o ṣí àwọn àǹfààní tuntun sílẹ̀ fún ṣíṣe àdáṣe àwọn iṣẹ́ tí o kò rò pé ó ṣeé ṣe.

Ẹ̀yà ara
● Iṣakoso Agbara Ideede, Yara lati di Awọn Ohun Alailagbara mu
● Iṣakoso Agbara to peye Ki o yara dimu
● Kíákíá láti gbéra àti dídìmọ́ra tó bàjẹ́
● Ẹni kékeré, Ó rọrùn láti sopọ̀ mọ́ ara rẹ̀
● Ìdènà Aṣọpọ̀ àti Ìdarí Alágbára
● Awọn Ipo Iṣakoso Pupọ Rọrun lati Ṣiṣẹ
Agbára, Bit àti Speed le jẹ́ ìṣàkóso Modbus
Yára láti Ṣí/Pípa
Àkókò ìṣípo ti ìkọlù kan ṣoṣo jẹ́ 0.1s
Iwọn Kekere
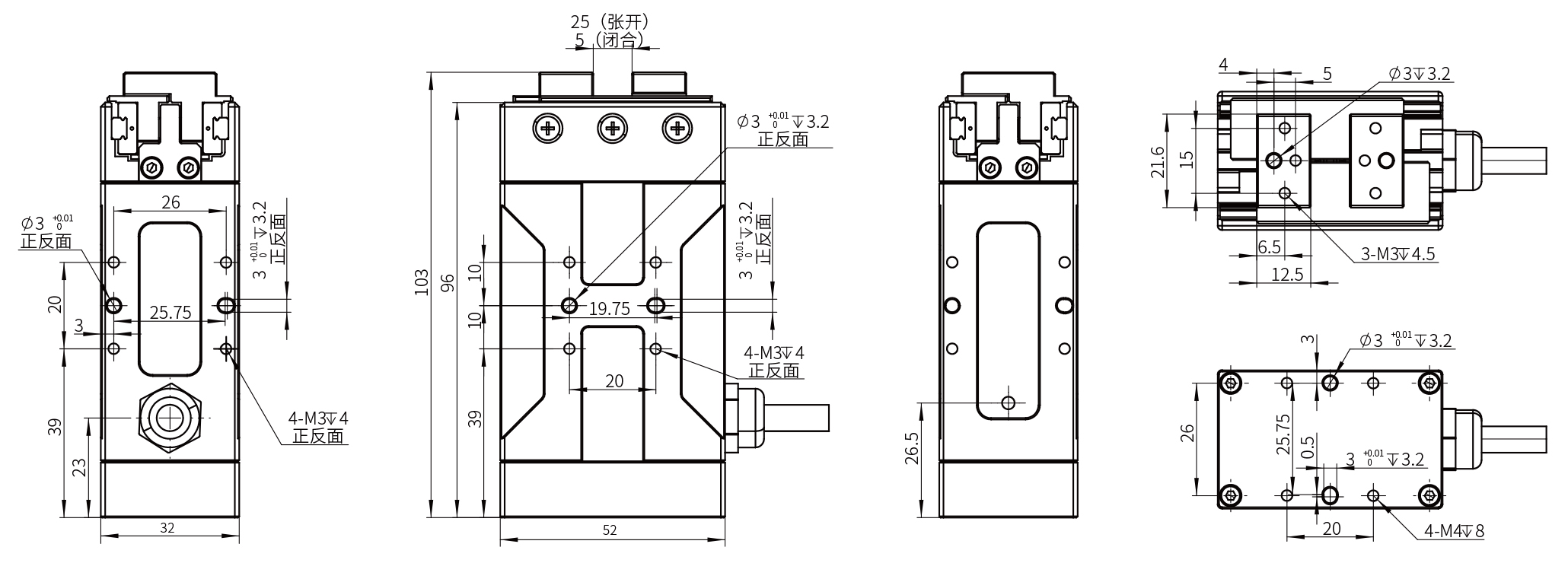
Iwọn rẹ̀ jẹ́ 52*32*103mm
Iṣakoso Agbara Giga Giga
±0.3N Ìṣàkóso Agbára Gíga, agbára jẹ́ 1-8N.
Oluṣakoso naa wa ni inu
Yara kekere ti o wa, o rọrun lati ṣepọ
Ipò Ìṣàkóso
Láti ṣe àtìlẹ́yìn fún 485 (Modbus RTU) àti I/O Control
Ìdìmọ́ra Rírọ
Ó lè di àwọn nǹkan tó jẹ́ ẹlẹ́gẹ́ mú

● Ṣíṣe ìgbéga ìyípadà nínú yíyípadà àwọn ohun èlò ìdènà pneumatic pẹ̀lú àwọn ohun èlò ìdènà iná mànàmáná, ohun èlò ìdènà iná mànàmáná àkọ́kọ́ pẹ̀lú ètò servo tí a ti ṣepọ̀ ní China.
● Rírọ́pò pípé fún compressor afẹ́fẹ́ + àlẹ̀mọ́ + fáìlì solenoid + fáìlì throttle + gígé pneumatic
● Ìgbésí ayé iṣẹ́ ọ̀pọ̀lọpọ̀ àwọn kẹ̀kẹ́, ní ìbámu pẹ̀lú sílíńdà ilẹ̀ Japan àtijọ́




Ìlànà Ìṣàpèjúwe
| Nọ́mbà Àwòṣe Z-EFG-20F | Àwọn ìpele |
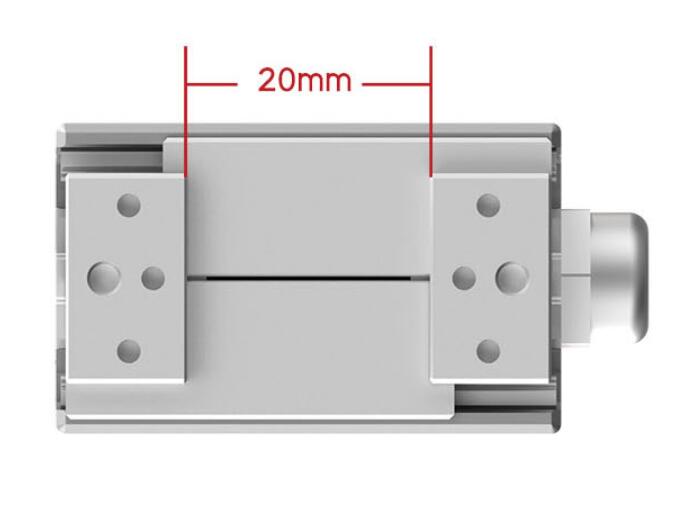
| Líle gbogbo àrùn | 20mm le ṣatunṣe |
| Agbára dídìmú | 1-8N tí a lè ṣàtúnṣe |
| Àtúnṣe | ±0.02mm |
| Iwuwo mimu ti a ṣeduro | ≤0.1kg |
| Ipo gbigbe | Àpótí jíà + Ìtọ́sọ́nà onílànà |
| Àtúnṣe òróró àwọn èròjà tí ń gbéra | Ni gbogbo oṣu mẹfa tabi miliọnu kan awọn iṣipopada / akoko |
| Àkókò ìṣípò ìlù ọ̀nà kan | 0.1s |
| Ipò ìṣípo | Ìka ọwọ́ méjì ń gbéra ní ìpele tí ó wà ní ìlà-òrùn |
| Ìwúwo | 0.5kg |
| Àwọn ìwọ̀n (L*W*H) | 52 * 32 * 103mm |
| Fóltéèjì iṣiṣẹ́ | 24V ± 10% |
| Iye lọwọlọwọ ti a ṣe ayẹwo | 0.4A |
| Òkè ìṣàn omi | 1A |
| Agbára | 10W |
| Ẹgbẹ́ ààbò | IP20 |
| Iru mọto | DC láìsí brush |
| Iwọn iwọn otutu iṣiṣẹ | 5-55℃ |
| Iwọn ọriniinitutu iṣiṣẹ | RH35-80 (Ko si yìnyín) |
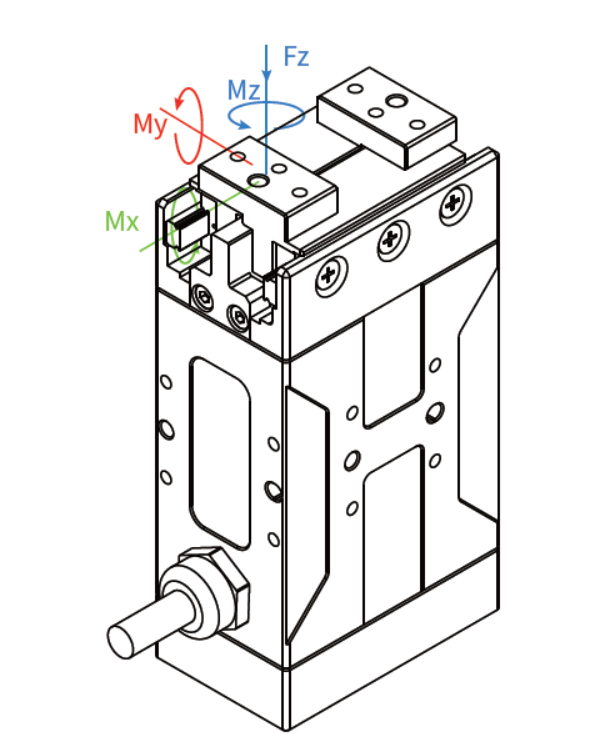
| Ẹrù tí a lè gbà láàyè ní ìtọ́sọ́nà inaro | |
| Fz: | 120N |
| Ìyípo tí a lè gbà láàyè | |
| Ọ̀gágun: | 0.6 Nm |
| Mi: | 1 Nm |
| Mz: | 1 Nm |
Iṣakoso Agbara to peye Ki o yara dimu
Agbára ìdènà iná mànàmáná Z-EFG-20F ni láti gba àpẹẹrẹ ìgbékalẹ̀ pàtàkì àti ìsanpadà algoridimu ìwakọ̀, gbogbo ìkọlù rẹ̀ ti dé 20mm, agbára ìdènà náà jẹ́ 1-8N.

Yára láti Gbé àti Ìdènà Ẹ̀gbin
Sisanra ti gripper ina yii jẹ 32mm nikan, ijinna apa kan ti ẹhin jẹ 0.1s nikan, o le pade lati ṣe ni aaye kekere, yara ati iduroṣinṣin lati dimu.
Àwòrán kékeré, Ó rọrùn láti sopọ̀ mọ́ ara rẹ̀

Ìwọ̀n Z-EFG-20F jẹ́ L52*W32*H103mm, ìṣètò rẹ̀ kéré, láti ṣe àtìlẹ́yìn fún àwọn ọ̀nà ìfisípò flexbile onípele púpọ̀, olùdarí rẹ̀ wà nínú rẹ̀, yàrá kékeré ló ń gbé, èyí tí ó lè rọrùn láti bójú tó onírúurú iṣẹ́ ìfọwọ́sowọ́pọ̀.

Asopọmọra Aṣọ Iwakọ ati Adarí Ti a Ṣọkan
Agbára ìdènà rẹ̀, bit àti iyàrá rẹ̀ ṣeé ṣàkóso, ìdènà ìdènà rẹ̀ lè yípadà ní irọ̀rùn, oníbàárà lè di àwọn ohun tí wọ́n béèrè fún mú, láti ṣe àgbékalẹ̀ ìdènà ìdènà náà, kí ó sì jẹ́ kí ìdènà iná mànàmáná náà lè parí iṣẹ́ ìdènà náà ní ìwọ̀n tó pọ̀ jùlọ.
Awọn Ipo Iṣakoso Pupọ Rọrun lati Ṣiṣẹ
Ṣíṣeto ẹ̀rọ ìdènà iná mànàmáná Z-EFG-20F rọrùn, ó ní ọ̀pọ̀lọpọ̀ àwọn ọ̀nà ìṣàkóso, láti ṣe àtìlẹ́yìn fún 485 (Modbus RTU) àti I/O bus-mastering, ó kàn nílò okùn kan, a lè ṣe àtúnṣe rẹ̀ kí a sì lò ó pẹ̀lú software.

Ibudo Ibudo ti Atunse Walẹ
Iṣẹ́ wa







